Paper:
Fish-Like Robot with a Deformable Body Fabricated Using a Silicone Mold
Mizuho Shibata
Kindai University
1 Takaya Umenobe, Higashi-Hiroshima, Hiroshima 739-2116, Japan

This paper describes a fish-like robot with a deformable outer shell fabricated using a silicone mold. Based on the difference in the contact condition between the serial-link robot and the shell, the fabrication methods are classified into embedded type and skin type. This study analyzes the mechanical properties of embedded and skin-type underwater robots from the viewpoint of material mechanics. A low-torque motor can sufficiently drive the skin-type underwater robot if the friction coefficient and pressure between the skin and the link are appropriately selected. Furthermore, the outer skin of the fish-like robot can be easily fabricated by defoaming in the chamber of a vacuum-packaging machine. Finally, the performance of the skin-type robot in air and underwater was assessed through several experiments.
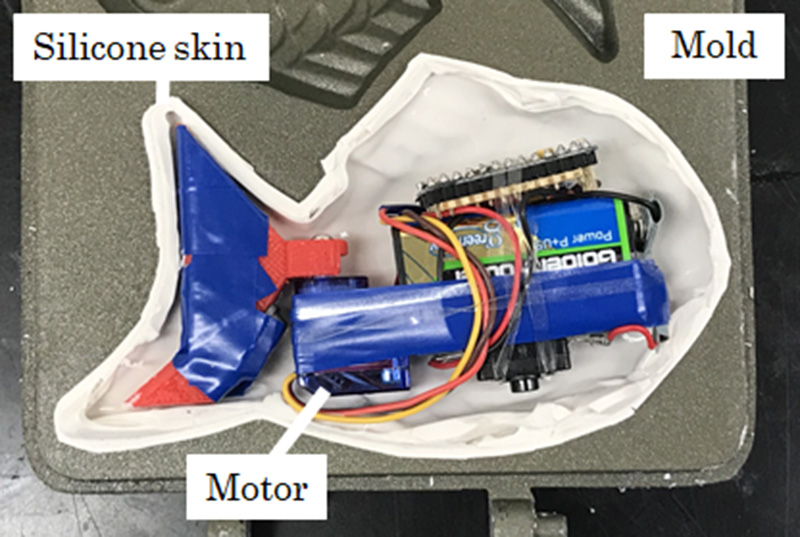
Fish-like robot fabricated by silicone mold
- [1] I. Yamamoto and Y. Terada, “Robotic fish and its technology,” Proc. SICE Annual Conf., Vol.1, pp. 342-345, 2003.
- [2] H. Sumoto and S. Yamaguchi, “Development of a motion control system using photoaxis for a fish type robot,” Proc. of the Int. Offshore and Polar Engineering Conf., pp. 307-310, 2010.
- [3] J. Conte, Y. Modarres-Sadeghi, M. Watts, F. S. Hover, and M. S. Triantafyllou, “A faststarting mechanical fish that accelerates at 40 m/s2,” Bioinspiration and Biomimetics, Vol.5, Issue 3, 035004, 2010.
- [4] N. Kato and H. Liu, “Optimization of motion of a mechanical pectoral fin,” JSME Int. J., Series C, Vol.46, No.4, pp. 1356-1362, 2003.
- [5] F. Xie, Z. Li, Y. Ding, Y. Zhong, and R. Du, “An Experimental Study on the Fish Body Flapping Patterns by Using a Biomimetic Robot Fish,” IEEE Robotics and Automation Letters, Vol.5, Issue 1, pp. 64-71, 2020.
- [6] J. Connor, B. Champion, and M. A. Joordens, “Current Algorithms, Communication Methods and Designs for Underwater Swarm Robotics: A Review,” IEEE Sensors J., Vol.21, Issue 1, pp. 153-169, 2021.
- [7] J. Liu, H. Hu and D. Gu, “A layered control architecture for autonomous robotic fish,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 9-15, 2006.
- [8] J. Yu, M. Tan, and L. Wang, “Cooperative control of multiple biomimetic robotic fish,” Recent Advances in Multi Robot Systems, pp. 263-290, 2008.
- [9] W. K. Yen, D. M. Sierra, and J. Guo, “Controlling a Robotic Fish to Swim Along a Wall Using Hydrodynamic Pressure Feedback,” IEEE J. of Oceanic Engineering, Vol.43, Issue 2, pp. 369-380, 2018.
- [10] W. Wang, X. Da, L. Li, B. H. Gheneti, Y. Ding, J. Yu, and G. Xie, “Three-Dimensional Modeling of a Fin-Actuated Robotic Fish With Multimodal Swimming,” IEEE/ASME Trans. on Mechatronics, Vol.23, Issue 4, pp. 1641-1652, 2018.
- [11] W. Wang, D. Gu, and G. Xie, “Autonomous Optimization of Swimming Gait in a Fish Robot With Multiple Onboard Sensors,” IEEE Trans. on Systems, Man, and Cybernetics: Systems, Vol.49, Issue 5, pp. 891-903, 2019.
- [12] D. Nakanishi, S. Kobayashi, K. Obara, S. Matsumura, and Y. Sueoka, “Development of a Fish-Like Robot with a Continuous and High Frequency Snap-Through Buckling Mechanism Using a Triangular Cam,” J. Robot. Mechatron., Vol.33, No.2, pp. 400-409, 2021.
- [13] F. Nose, Y. Sueoka, D. Nakanishi, Y Sugimoto, and K. Osuka, “Design of Fin-Curvature-Based Feedback Controller for Efficient Swimming,” J. Robot. Mechatron., Vol.33, No.4, pp. 955-967, 2021.
- [14] C. C. Eriksen, T. J. Osse, R. D. Light, T. Wen, T. W. Lehman, P. L. Sabin, J. W. Ballard, and A. M. Chiodi, “Seaglider: a long-range autonomous underwater vehicle for oceanographic research,” IEEE J. of Oceanic Engineering, Vol.26, No.4, pp. 424-436, 2001.
- [15] M. Shibata and N. Sakagami, “Fabrication of A Fish-like Underwater Robot with Flexible Plastic Film Body,” Advanced Robotics, Vol.29, Issue 1, pp. 103-113, 2015.
- [16] N. Sakagami and M. Shibata, “Dynamic Modeling of a Serial Link Robot Laminated with Plastic Film (Chapter 4),” Lamination – Theory and Application, InTech, pp. 73-88, 2018.
- [17] W. Zhao, Y. Zhang, and N. Wang, “Soft Robotics: Research, Challenges, and Prospects,” J. Robot. Mechatron., Vol.33, No.1, pp. 45-68, 2021.
- [18] K. Stoeckhert and G. Mennig, “Mold-Making Handbook,” Carl Hanser Verlag GmbH & Co., 1999.
- [19] T. Aono and Y. Nakamura, “Design of humanoid with insert-molded cover towards the variety of exterior design of robots,” Proc. of the 2005 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3342-3347, 2005.
- [20] M. Hayashi, T. Sagisaka, Y. Ishizaka, T. Yoshikai, and M. Inaba, “Development of functional whole-body flesh with distributed three-axis force sensors to enable close interaction by humanoids,” Proc. of Int. Conf. on Intelligent Robots and Systems, pp. 3610-3615, 2007.
- [21] K. Kobayashi, T. Yoshikai, and M. Inaba, “Development of humanoid with distributed soft flesh and shock-resistive joint mechanism for self-protective behaviors in impact from falling down,” Proc. of Int. Conf. on Robotics and Biomimetics, pp. 2390-2396, 2011.
- [22] T. Mitsuda and N. Matsuo, “Shape Stabilizer Using Vacuum Pressure (Mechanical Characteristics of Articulation-Type Mechanical Constraint),” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.76, No.719, pp. 2226-2231, 2006 (in Japanese).
- [23] S. Kawamura, T. Yamamoto, D. Ishida, T. Ogata, Y. Nakayama, O. Tabata, and S. Sugiyama, “Development of Passive Elements with Variable Mechanical Impedance for Wearable Robots,” Proc. of Int. Conf. on Robotics and Automation, pp. 248-253, 2002.
- [24] W. Chwei-Sen, O. H. Stielau, and G. A. Covic, “Design considerations for a contactless electric vehicle battery charger,” IEEE Trans. on Industrial Electronics, Vol.52, Issue 5, pp.1308-1314, 2005.
- [25] S. Y. R. Hui and W. W. C. Ho, “A new generation of universal contactless battery charging platform for portable consumer electronic equipment,” IEEE Trans. on Power Electronics, Vol.20, Issue 3, pp. 620-627, 2005.
- [26] T. Kojiya, F. Sato, H. Matsuki, and T. Sato, “Automatic power supply system to underwater vehicles utilizing non-contacting technology,” Proc. of OCEANS ’04, Vol.4, pp. 2341-2345, 2004.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.