Paper:
Gait Rehabilitation and Locomotion Support System Using a Distributed Controlled Robot System
Katsuhiko Nishizawa, Toru Tsumugiwa, and Ryuichi Yokogawa
Department of Biomedical Engineering, Doshisha University
1-3 Tatara Miyakodani, Kyotanabe, Kyoto 610-0394, Japan

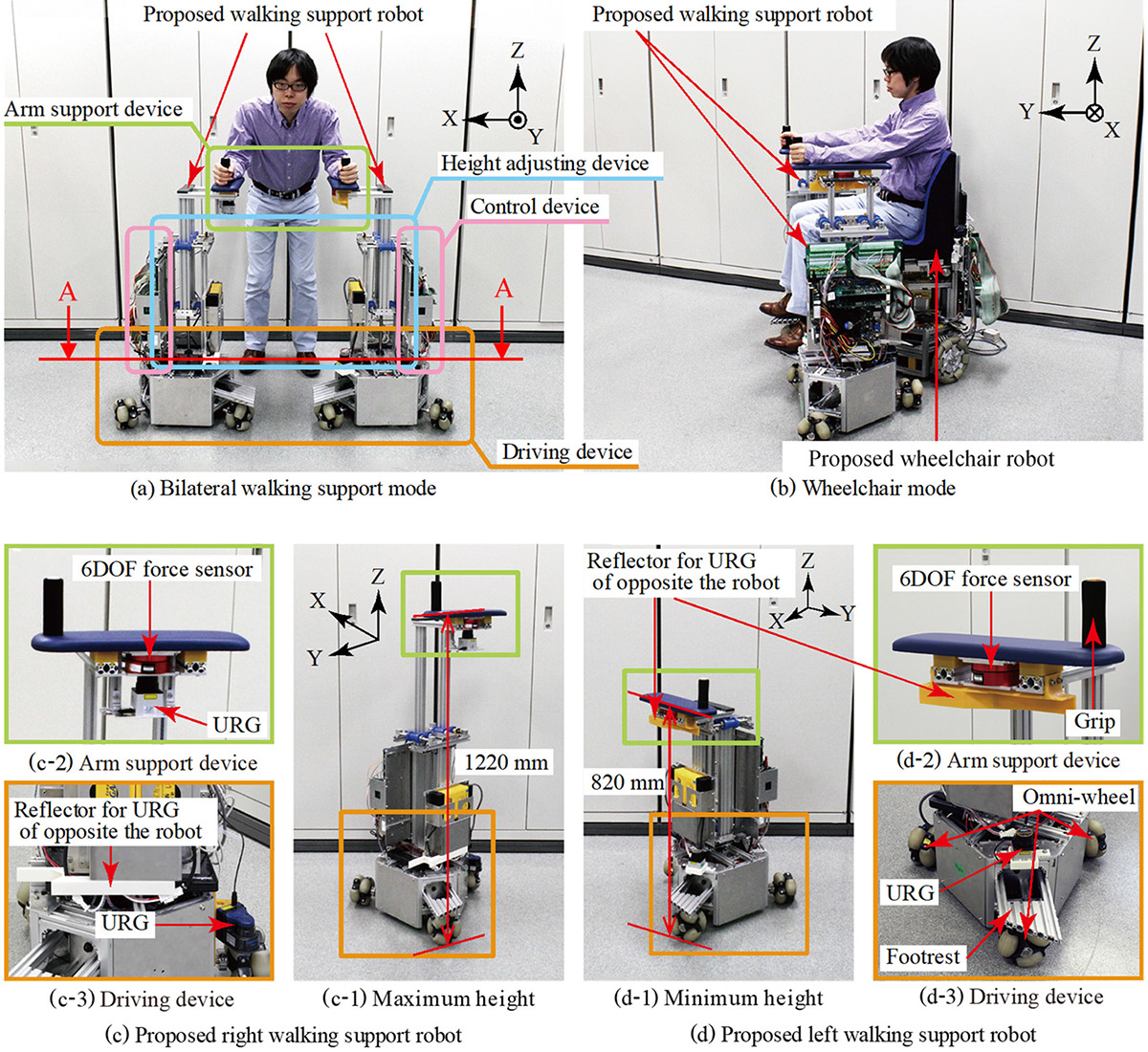
In this paper, we proposed a distributed controlled gait rehabilitation and locomotion support system through human-robot cooperative control, and combination of two cane-type walking support robots (left and right) and one wheelchair robot to support the walking and locomotion of a person in need of walking assistance. The proposed system can realize five types of motion support from gait training to daily motion support, using three types of motion support modes with a distributed robot control system comprising up to three robots to support the user’s independence for walking and moving. The cane-type walking support robot moved in response to the manipulation force applied to the robot by the user, and can realize walking/movement support in all directions through the omnidirectional traveling part. In addition, the height of the robot can be adjusted according to the user’s physique, and the motion characteristics can be set according to the user’s walking ability. The wheelchair robot has a seat that can be raised, lowered, and tilted to provide standing assistance for the user and mobility support as an electric wheelchair. In this study, we developed a prototype of the proposed system and demonstrated its feasibility for five types of assistive actions in experiments with healthy subjects.
Overview of the distributed robot control system
- [1] M. M. Martins, C. P. Santos, A. F. Neto, and R. Ceres, “Assistive mobility devices focusing on smart walkers: classification and review,” Robotics and Autonomous Systems, Vol.60, Issue 4, pp. 548-562, 2012.
- [2] A. Koenig, D. Novak, X. Omlin, M. Pulfer, E. Perreault, L. Zimmerli, M. Mihelj, and R. Riener, “Real-Time Closed-Loop Control of Cognitive Load in Neurological Patients During Robot-Assisted Gait Training,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.19, No.4, pp. 453-464, 2011.
- [3] R. Ronsse, B. Koopman, N. Vitiello, T. Lenzi, S. M. De Rossi, J. van den Kieboom, E. van Asseldonk, M. C. Carrozza, H. van der Kooij, and A. J. Ijspeert, “Oscillator-based Walking Assistance: a Model-free Approach,” Proc. of IEEE Int. Conf. on Rehabilitation Robotics, pp.1-4, 2011.
- [4] K. Knaepen, P. Beyl, S. Duerinck, F. Hagman, D. Lefeber, and R. Meeusen, “Human-Robot Interaction: Kinematics and Muscle Activity Inside a Powered Compliant Knee Exoskeleton,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.22, No.6, pp. 1128-1137, 2014.
- [5] M. Peshkin, D. A. Brown, J. J. Santos-Munne, and A. Makhlin, “KineAssist: a robotic overground gait and balance training device,” Proc. of IEEE 9th Int. Conf. on Rehabilitation Robotics, pp. 241-246, 2005.
- [6] C. Tiseo, Z. Y. Lim, C. Y. Shee, and W. T. Ang, “Mobile Robotic Assistive Balance Trainer – an intelligent compliant and adaptive robotic balance assistant for daily living,” Proc. of the 36th Annual Int. Conf. of the IEEE Engineering in Medicine and Biology Society, pp. 5300-5303, 2014.
- [7] A. Tsukahara, Y. Hasegawa, K. Eguchi, and Y. Sankai, “Restoration of Gait for Spinal Cord Injury Patients Using HAL With Intention Estimator for Preferable Swing Speed,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.23, No.2, pp. 308-318, 2015.
- [8] J. A. Blaya and H. Herr, “Adaptive Control of a Variable-Impedance Ankle-Foot Orthosis to Assist Drop-Foot Gait,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.12, No.1, pp. 24-31, 2004.
- [9] J. E. Pratt, B. T. Krupp, C. J. Morse, and S. H. Collins, “The RoboKnee: An Exoskeleton for Enhancing Strength and Endurance During Walking,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 2430-2435, 2004.
- [10] M. Talaty, A. Esquenazi, and J. E. Briceno, “Differentiating ability in users of the ReWalk powered exoskeleton: An analysis of walking kinematics,” Proc. of IEEE 13th International Conference on Rehabilitation Robotics (ICORR), pp. 1-5, 2013.
- [11] S. K. Banala, S. K. Agrawal. A. Fattah, V. Krishnamoorthy, W. Hsu, J. Scholz, and K. Rudolph, “Gravity-Balancing Leg Orthosis and Its Performance Evaluation,” IEEE Trans. on Robotics, Vol.22, No.6, pp. 1228-1239, 2006.
- [12] K. Wakita, J. Huang, P. Di, K. Sekiyama, and T. Fukuda, “Human-Walking-Intention-Based Motion Control of an Omnidirectional-Type Cane Robot,” IEEE/ASME Trans. on Mechatronics, Vol.18, No.1, pp. 285-295, 2013.
- [13] B. Graf and R. D. Schraft, “Behavior-based path modification for shared control of robotic walking aids,” Proc. of IEEE 10th Int. Conf. on Rehabilitation Robotics, pp. 317-322, 2007.
- [14] A. Monist, R. Donamukkalat, A. Kapuriat, A. Steinfeldt, J. T. Matthewsi, J. Dunbar-Jacob, and S. Thrunti, “A Robotic Walker that Provides Guidance,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 25-30, 2003.
- [15] P. Sun and S. Wang, “Improvement Model for Omnidirectional Rehabilitative Training Walker and Tracking Control,” Proc. of IEEE Int. Conf. on Mechatronics and Automation, pp. 1359-1364, 2014.
- [16] G. Wasson, P. Sheth, C. Huang, A. Ledoux, and M. Alwan, “A physics-based model for predicting user intent in shared-control pedestrian mobility aids,” Proc. of IEEE Int. Conf. on Intelligent Robots and Systems, pp. 1914-1919, 2004.
- [17] O. Chuy Jr., Y. Hirata, and K. Kosuge, “A Control Approach Based on Passive Behavior to Enhance User Interaction,” IEEE Trans. on Systems, Man, and Cybernetics, Part C: Applications and Reviews, Vol.36, No.6, pp. 725-733, 2006.
- [18] S. Nakagawa, Y. Hasegawa, T. Fukuda, I. Kondo, M. Tanimoto, P. Di, J. Huang, and Q Huang, “Tandem Stance Avoidance Using Adaptive and Asymmetric Admittance Control for Fall Prevention,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 5898-5903, 2015.
- [19] M. Spenko, H. Yu, and S. Dubowsky, “Robotic Personal Aids for Mobility and Monitoring for the Elderly,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.14, No.3, pp. 344-351, 2006.
- [20] H. M. Shim, C. Y. Chung, E. H. Lee, H. K. Min, and S. H. Hong, “Silbo: Development Walking Assistant Robot for the Elderly Based on Shared Control Strategy,” IJCSNS Int. J. of Computer Science and Network Security, Vol.6, No.9A, pp. 189-195, 2006.
- [21] S. Taghvaei, Y. Hirata, and K. Kosuge, “Comparative Study of Visual Human State Classication; an Application for a Walker Robot,” Proc. of the 4th IEEE RAS/EMBS Int. Conf. on Biomedical Robotics and Biomechatronics, pp. 1843-1849, 2012.
- [22] Y. Hirata, A. Hara, and K. Kosuge, “Motion Control of Passive Intelligent Walker using Servo Brakes,” IEEE Trans. on Robotics, Vol.23, No.5, pp. 981-990, 2007.
- [23] T. Kikuchi, T. Tanaka, K. Anzai, S. Kawakami, M. Hosaka, and K. Niino, “Evaluation of line-tracing controller of intelligently controllable walker,” Advanced Robotics, Vol.27, No.7, pp. 493-502, 2012.
- [24] C. H. Ko, K. Y. Young, Y. C. Huang, and S. K. Agrawal, “Active and Passive Control of Walk-Assist Robot for Outdoor Guidance,” IEEE/ASME Trans. on Mechatronics, Vol.18, No.3, pp. 1211-1220, 2013.
- [25] G. Lee, T. Ohnuma, N. Y. Chong, and S. Lee, “Walking Intent-Based Movement Control for JAIST Active Robotic Walker,” IEEE Trans. on Systems, Man, and Cybernetics, Vol.44, No.5, pp. 665-672, 2014.
- [26] K. Ishida, S. Wang, and T. Kishi, “Development of all-way mobile Walke,” J. of physical Medicine, Vol.19, No.4, pp. 246-250, 2008 (in Japanese).
- [27] S. Watanabe, T. Tsumugiwa, and R. Yokogawa, “Gait Analysis of Walking Locomotion Enhanced by an Impedance-Controlled Gait-Aid Walker-Type Robot,” IEEE/SICE Int. Symp. on System Integration, pp. 1187-1192, 2020.
- [28] C. Zhu, M. Oda, M. Yoshioka, T. Nishikawa, S. Shimazu, and X. Luo, “Admittance Control Based Walking Support and Power Assistance of an Omnidirectional Wheelchair Typed Robot,” Proc. of IEEE Int. Conf. on Robotics and Biomimetics, pp. 381-386, 2010.
- [29] F. Shi, Q. Cao, C. Leng, and H. Tan, “Based on Force Sensing-Controlled Human-Machine Interaction System for Walking Assistant Robot,” Proc. of the 8th World Congress on Intelligent Control and Automation, pp. 6523-6533, 2010.
- [30] Y. Le, H. Kojima, and K. Matsuda, “Cooperative Obstacle-Avoidance Pushing Transportation of a Planar Object with One Leader and Two Follower Mobile Robots,” J. Robot. Mechatron., Vol.17, No.1, pp. 77-88, 2005.
- [31] Y. Kume, Y. Hirata, and K. Kosuge, “Object Handling by Coordinated Multiple Mobile Manipulators Without Force/Torque Sensors,” J. Robot. Mechatron., Vol.20, No.3 pp. 394-402, 2008.
- [32] L. Vig and J. A. Adams, “Multi-Robot Coalition Formation,” IEEE Trans. on Robotics, Vol.22, No.4, pp. 637-649, 2006.
- [33] J. D. F. Heredia, J. I. U. Rubrico, S. Shirafuji, and J. Ota, “Teaching Tasks to Multiple Small Robots by Classifying and Splitting a Human Example,” J. Robot. Mechatron., Vol.29, No.2, pp. 419-433, 2017.
- [34] J. Nagi, H. Ngo, L. M. Gambardella, and G. A. DiCaro, “Wisdom of the Swarm for Cooperative Decision-Making in Human-Swarm Interaction,” Proc. of 2015 IEEE Int. Conf. on Robotics and Automation, pp. 1802-1808, 2015.
- [35] Y. Ikemoto, K. Nishimura, Y. Mizutama, T. Sasaki, and M. Jindai, “Network Connectivity Control of Mobile Robots by Fast Position Estimations and Laplacian Kernel,” J. Robot. Mechatron., Vol.32, No.2, pp. 422-436, 2020.
- [36] T. Kida, Y. Sueoka, H. Shigeyoshi, Y. Tsunoda, Y. Sugimoto, and K. Osuka, “Verification of Acoustic-Wave-Oriented Simple State Estimation and Application to Swarm Navigation,” J. Robot. Mechatron., Vol.33, No.1, pp. 119-128, 2021.
- [37] T. Kagawa and Y. Uno, “A human interface for stride control on a wearable robot,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4067-4072, 2009.
- [38] S. Suzuki, Y. Hirata, K. Kosuge, and H. Onodera, “Motion Support during the Swing Phase using Cooperative Walking Support System,” Advanced Robotics, Vol.27, No.17, pp. 1337-1349, 2013.
- [39] Y. Hasegawa, J. Jang, and Y. Sankai, “Cooperative walk control of paraplegia patient and assistive system,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4481-4486, 2009.
- [40] J. Perry and M. J. Burnfield, “GAIT ANALYSIS-Normal and Pathological Function 2nd ed.,” Ishiyaku Publishers Inc., 2012 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.