
Abstract
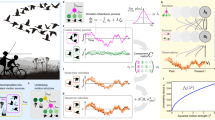
The fact that people are embodied places powerful constraints on their motion. By leveraging these constraints, we can build systems to perceive human motion that are fast and robust. More importantly, by understanding how these constraint systems relate to one another, and to the perceptual process itself, we can make progress toward building systems that interpret, not just capture, human motion.
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


Author information
Authors and Affiliations
Editor information
Rights and permissions
About this chapter
Cite this chapter
R. Wren, C. Perception for Human Motion Understanding. In: Apolloni, B., Ghosh, A., Alpaslan, F., C. Jain, L., Patnaik, S. (eds) Machine Learning and Robot Perception. Studies in Computational Intelligence, vol 7. Springer, Berlin, Heidelberg. https://doi.org/10.1007/11504634_7
Download citation
DOI: https://doi.org/10.1007/11504634_7
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-26549-8
Online ISBN: 978-3-540-32409-6
eBook Packages: EngineeringEngineering (R0)