
Abstract
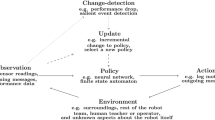
The General Suppression Control Framework (GSCF) is a framework inspired by the suppression hypothesis of the immune discrimination theory. The framework consists of five distinct components, the Affinity Evaluator, Cell Differentiator, Cell Reactor, Suppression Modulator, and the Local Environment. These reactive components, each responsible for a specific function, can generate long-term and short-term influences to other components by the use of humoral and cellular signals.
This paper focuses in the design of a control system that aims to balance and navigate a self-balancing robot though obstacles based on the five components in GSCF. The control system demonstrates how simple combination of suppression mechanism can filter and fuses two unstable measurements together to obtain reliable measurement to maintain the balance of a dynamically unstable system. The control system is implemented in a two-wheeled self-balancing robot for its inherited instability can best demonstrate the systems responsiveness to dynamic changes.
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
Anderson, D.P.: nbot, a two wheel balancing robot (Online) (April 20, 2005) Available from http://geology.heroy.smu.edu/~dpa-www/robo/nbot/ (26.04.2005)
Benjamini, E., Sunshine, G., Leskowitz, S.: Immunology: A Short Course. Wiley-Liss, New York (1996)
Bentley, P.J.: Evolution Design by Computers. Morgan Kaufmann, Bath (1999)
Blackwell, T.: Building a Balancing Scooter (Online) (April 26, 2005), Available from http://www.tlb.org/scooter.html (26.04.2005)
de Castro, L.N., Timmis, J.: Artificial Immune Systems: A New Computational Intelligence Approach. Springer, New York (2002)
Dasgupta, D.: Artificial Immune Systems and Their Applications. Springer, Heidelberg (1999)
Erkmen, I., Erkmen, A.: Snake Robots to the Rescue. IEEE Robotics & Automation Magazine 2, 1513–1518 (2002)
Grasser, F., D’Arrigo, A., Colombi, S., Rufer, A.C.: JOE: A Mobile, Inverted Pendulum. IEEE Transactions on Industrial Electronics 49(1), 107–114 (2002)
Hassoun, M.H.: Fundamentals of Artificial Neural Networks. MIT Press, Massachusetts (1995)
Ishida, Y.: Immunity-Based Systems - A Design Perspective. Springer, Germany (2004)
Kimura, S., Takahashi, M., Okuyama, T.: A Fault-Tolerant Control Algorithm Having a Decentralized Autonomous Architecture for Space Hyper-Redundant Manipulators. IEEE Transaction on Systems Man, and Cybernetics-Part A: Systems and Humans 28(4), 521–528 (1998)
Ko, A.W.Y., Lau, T.L., Lau, Y.K.H.: An Immuno Control Framework for Decentralized Mechatronic Control. To appear in International Journal of Unconventional Computing - 2005 Special Issue (2005)
Ko, A.W.Y., Lau, T.L., Lau, Y.K.H.: An immuno control framework for decentralized mechatronic control. In: Nicosia, G., Cutello, V., Bentley, P.J., Timmis, J. (eds.) ICARIS 2004. LNCS, vol. 3239, pp. 91–105. Springer, Heidelberg (2004)
Kobilarov, M.B., Sukhatme, G.: Near Time-optimal Constrained Trajectory Planning on Outdoor Terrain. To appear in Proc. IEEE International Conference on Robotics and Automation (ICRA 2005), Barcelona, Spain, April 18-22 (2005)
Lau, Y.K.H., Wong, W.K.V.: Immunologic responses manipulation of AIS agents. In: Nicosia, G., Cutello, V., Bentley, P.J., Timmis, J. (eds.) ICARIS 2004. LNCS, vol. 3239, pp. 65–79. Springer, Heidelberg (2004)
Playfair, J.H.L., Chain, B.M.: Immunology at a Glance. Blackwell Science, Bodmin (2001)
Ray, T.S.: Overview of Tierra at ATR, in Technical Information, no. 15, Technologies for Software Evolutionary Systems, ATR-HIP, (2001) http://www.isd.atr.co.jp/ray/pubs/overview/Overview.doc
Segel, L.A., Cohen, I.R.: Design Principles for the Immune System and Other Distributed Autonomous Systems. Oxford University Press, Oxford (2001)
Sharon, J.: Basic Immunology. Williams & Wilkins, Pennsylvania (1998)
Sherman, B., Sherman, M.: BaliBot, An Inverted Pendulum Robot (Online) (18th April, 2005), Available from http://home.earthlink.net/%7Ebotronics/index/balibot.html (26.04.2005)
Sipper, M.: Machine Nature: the Coming Age of Bio-inspired Computing. McGraw-Hill, New York (2002)
Sompayrac, L.: How the Immune System Works. Blackwell, Malden (1999)
Tarakanov, A.O., Skormin, V.A., Sokolova, S.P.: Immunocomputing: Principles and Applications. Springer, New York (2003)
Wooldridge, M.J.: An Introduction to multiagent systems. John Wiley & Sons, West Sussex (2002)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2005 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Ko, A., Lau, H.Y.K., Lau, T.L. (2005). General Suppression Control Framework: Application in Self-balancing Robots. In: Jacob, C., Pilat, M.L., Bentley, P.J., Timmis, J.I. (eds) Artificial Immune Systems. ICARIS 2005. Lecture Notes in Computer Science, vol 3627. Springer, Berlin, Heidelberg. https://doi.org/10.1007/11536444_29
Download citation
DOI: https://doi.org/10.1007/11536444_29
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-28175-7
Online ISBN: 978-3-540-31875-0
eBook Packages: Computer ScienceComputer Science (R0)