
Abstract
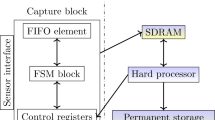
This paper presents an embedded multi-camera system for Simultaneous Localization and Mapping (SLAM) for mobile robots. The multi-camera system has been designed and implemented as a SoC (System-on-a-Chip), using reconfigurable computing technology. In this system the images are captured in real-time by means of four CMOS digital cameras. After some pre-processing steps, those images are sent to an embedded softcore processor by a direct memory access (DMA) channel. In this system, images are captured, pre-processed and sent to the embedded processor at 30 frames per second in color mode and 60 frames per second in gray-scale mode. This paper also shows the main advantages of using multi-cameras to implement SLAM based on the Extended Kalman Filter.
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
Altera Corp. Nios II CPU (2004)
Altera Corp. Nios development kit, stratix edition (2005)
Bonato, V., Sanches, A.K., Fernandes, M.M., João, M., Cardoso, P., Simoes, E.D.V., Marques, E.: A real time gesture recognition system for mobile robots. In: International Conference on Informatics in Control, Automation and Robotics (ICINCO 2004), Setúbal, Portugal, pp. 207–214 (2004)
Borenstein, J., Everett, C.H.R., Feng, L.: Where am i? sensors and methods for mobile robot positioning (1996)
Brown, S., Vranesic, Z.: Fundamentals of digital logic with VHDL design, 2nd edn. Mc Graw Hill, Toronto (2005)
Habibi, A., Tahar, S.: A survey on system-on-a-chip design languages. In: The 3rd IEEE International Workshop on System-on-Chip for Real-Time Applications, Calgary, Alberta, Canada, pp. 212–215 (2003)
Kim, G.-H., Kim, J.-S., Hong, K.-S.: Vision-based simultaneous localization and mapping with two cameras. In: IEEE International Conference on Intelligent Robots and Systems, pp. 3401–3406 (2005)
Maybeck, P.S.: Stochastic models, estimation, and control, vol. 1. Academic Press, London (1979)
Simsie, L.: Using programmable logic for embedded systems. Technical report, Altera Corporation (December 2003)
Smith, R., Self, M., Cheeseman, P.: Estimating uncertain spatial relationships in robotics, pp. 167–193 (1990)
Thomas, B.: Embedded Robotics: Mobile Robot Design and Applications with Embedded Systems. Springer, Heidelberg (2003)
Wolf, W., Ozer, B., Lv, T.: Smart cameras as embedded systems, pp. 48–53. IEEE Computer Society, Los Alamitos (2002)
Xilinx Inc. Aerospace & defense (2004)
Zemcik, P.: Hardware acceleration of graphics and imaging algorithms using fpgas, pp. 25–32 (2002)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2006 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Bonato, V., de Holanda, J.A., Marques, E. (2006). An Embedded Multi-camera System for Simultaneous Localization and Mapping. In: Bertels, K., Cardoso, J.M.P., Vassiliadis, S. (eds) Reconfigurable Computing: Architectures and Applications. ARC 2006. Lecture Notes in Computer Science, vol 3985. Springer, Berlin, Heidelberg. https://doi.org/10.1007/11802839_15
Download citation
DOI: https://doi.org/10.1007/11802839_15
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-36708-6
Online ISBN: 978-3-540-36863-2
eBook Packages: Computer ScienceComputer Science (R0)