
Abstract
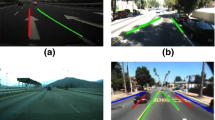
This paper presents a Road Detection and Classification algorithm for Driver Assistance Systems (DAS), which tracks several road lanes and identifies the type of lane boundaries. The algorithm uses an edge filter to extract the longitudinal road markings to which a straight lane model is fitted. Next, the type of right and left lane boundaries (continuous, broken or merge line) is identified using a Fourier analysis. Adjacent lanes are searched when broken or merge lines are detected. Although the knowledge of the line type is essential for a robust DAS, it has been seldom considered in previous works. This knowledge helps to guide the search for other lanes, and it is the basis to identify the type of road (one-way, two-way or freeway), as well as to tell the difference between allowed and forbidden maneuvers, such as crossing a continuous line.
This work is partially supported by the Spanish government through the CICYT project ASISTENTUR.
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


References
Aufrére, R., Chapuis, R., Chausse, F.: A model-driven approach for real-time road recognition. Machine Vision and Applications 13(2), 95–107 (2001)
Broggi, A.: Robust real-time lane and road detection in critical shadow conditions. In: IEEE International Symposium on Computer Vision, Coral Gables, Florida, November 19-21, 1995, pp. 353–358. IEEE Computer Society Press, Los Alamitos (1995)
Campbell, N.W., Thomas, B.T.: Navigation of an autonomous road vehicle using lane boundary markings. In: Charnley, D. (ed.) 1st IFAC Int. Conference on Intelligent Autonomous Vehicles, pp. 169–174. Pergamon Press, Oxford (1993)
Chapuis, R., Aufrere, R., Chausse, F.: Accurate road following and reconstruction by computer vision. IEEE Transactions on Pattern Analysis and Machine Intelligence 3(4) (December 2002)
Collado, J.M., Hilario, C., de la Escalera, A., Armingol, J.M.: Self-calibration of an on-board stereo-vision system for driver assistance systems. In: IEEE Intelligent Vehicle Symposium, Tokyo, Japan, June 13-15 (2006)
DeMenthon, D.: A zero-bank algorithm for inverse perspective of a road from a single image. In: IEEE International Conference on Robotics and Automation, Raleigh, NC, April 1987, pp. 1444–1449 (1987)
Dickmans, E.D., Mysliwetz, B.D.: Recursive 3-d road and relative ego-state recognition. IEEE Transactions on Pattern Analysis and Machine Intelligence 14(2), 199–213 (1992)
Hilario, C., Collado, J.M., Armingol, J.M., de la Escalera, A.: Pyramidal image analysis for vehicle detection. In: IEEE Intelligent Vehicle Symposium, Las Vegas, Nevada, U.S.A, June 6-8, 2005, pp. 87–92 (2005)
Hough, P.V.C.: Machine analysis of bubble chamber pictures. In: CERN (ed.) International Conference on High Energy Accelerators and Instrumentation, pp. 554–556 (1959)
Isard, M., Blake, A.: Condensation – conditional density propagation for visual tracking. International Journal of Computer Vision 29(1), 5–28 (1998)
Kanatani, K., Watanabe, K.: Reconstruction of 3-d road geometry from images for autonomous land vehicles. IEEE Transactions on Robotics and Automation 6(1) (February 1990)
Kluge, K., Lakshmanan, S.: A deformable-template approach to lane detection. In: Proceedings of the Intelligent Vehicles 1995 Symposium, September 25-26, 1995, pp. 54–59 (1995)
Risack, R., Klausmann, P., Küger, W., Enkelmann, W.: Robust lane recognition embedded in a real-time driver assistance system. In: IEEE International Conference on Intelligent Vehicles, pp. 35–40 (1998)
Southall, B., Taylor, C.J.: Stochastic road shape estimation. In: 8th IEEE International Conference on Computer Vision (ICCV), July 7-14, 2001, vol. 1, pp. 205–212 (2001)
Wang, Y., Shen, D., Teoh, E.K.: Lane detection using spline model. Pattern Recognition Letters 21(8), 677–689 (2000)
Wang, Y., Teoh, E.K., Shen, D.: Lane detection and tracking using b-snake. Image and Vision computing 22, 269–280 (2004)
Yuille, A.L., Coughlan, J.M.: Fundamental limits of bayesian inference: order parameters and phase transitions for road tracking. IEEE Transactions on Pattern Analysis and Machine Intelligence 22(2), 160–173 (2000)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2006 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Collado, J.M., Hilario, C., de la Escalera, A., Armingol, J.M. (2006). Adaptative Road Lanes Detection and Classification. In: Blanc-Talon, J., Philips, W., Popescu, D., Scheunders, P. (eds) Advanced Concepts for Intelligent Vision Systems. ACIVS 2006. Lecture Notes in Computer Science, vol 4179. Springer, Berlin, Heidelberg. https://doi.org/10.1007/11864349_105
Download citation
DOI: https://doi.org/10.1007/11864349_105
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-44630-9
Online ISBN: 978-3-540-44632-3
eBook Packages: Computer ScienceComputer Science (R0)