
Abstract
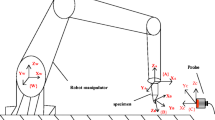
The aim of the work described here is to design a dexterous and intelligent robotic arm to automate the non-destructive testing and evaluation of geometrically complex industrial products. The robot is required to scan contoured surfaces with ultrasonic and eddy current sensors without the need to position the test pieces precisely, thereby reducing inspection times. In addition, the arm should be lightweight so that it can be carried by wall-climbing and walking robots but at the same time it should be rugged enough to be operated in industrial environments where the tool (sensor probe) comes into contact with rigid and unknown test surfaces. To realise these aims, a seven-axis lightweight and rugged robot arm has been specially developed for non-destructive testing (NDT) and is reported here. The arm weighs 22 kg and is designed for portability, dexterity, ruggedness in an industrial environment and 1 mm repeatability. Its NDT payload is 4 kg. Current work is directed at developing a control system for the arm with a proven operating system with further work required to make the arm adapt to uncertain surfaces.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
URL http://www.automation.com/store/pid9244.php [Jun 2005]
Sattar T.P., Alaoui M., Chen S., Bridge B. (2001) ROBHULL: A magnetically adhering Wall Climbing Robot to Perform Continuous Welding of Long Seams and Non Destructively Test the Welds on the Hull of a Container Ship, 8th IEEE Conference on Mechatronics and Machine Vision in Practice, M2VIP2001, pp. 408–414, ISBN 962-442-191-9, Paper No. 129.
Smith M L (2001): Surface Inspection Techniques, Edmundsbury Press Limited, Suffolk, UK.
Xiao D., Ghosh B. K., Xi N, and Tarn T. J (1999): Sensor-based hybrid position/force control of a robot manipulator in an uncalibrated environment. IEEE transactions on control systems technology, Vol.8, No.4, Jul 2000.
Adept Technology, Inc.: Adept Force VME User’s Guide (1995), USA.
URL http://www.jr3.com/dsp.html [Jun 2005].
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2006 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Sattar, T.P., Brenner, A.A. (2006). 7-axis Arm for NDT of Surfaces with Complex & Unknown Geometry. In: Tokhi, M.O., Virk, G.S., Hossain, M.A. (eds) Climbing and Walking Robots. Springer, Berlin, Heidelberg. https://doi.org/10.1007/3-540-26415-9_113
Download citation
DOI: https://doi.org/10.1007/3-540-26415-9_113
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-26413-2
Online ISBN: 978-3-540-26415-6
eBook Packages: EngineeringEngineering (R0)