
Abstract
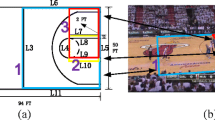
In this paprer a method of automated detection of rectangular landmarks is presented. A landmark can be found if it has a monochromatic and characteristic color. The landmark doesn’t need to be visible as a whole, it can be partially obstructed by other objects.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
Wolczyk P. Bal A., Palus H. Selected properties of perceptual colour spaces. In Proceeedings of 2nd Conference on Computer Recognition Systems KOSYR’01. Milkow, 2001.
Siemiatkowska Barbara. The use of hough transform for localization of the mobile robot. Pomiar Automatyka Kontrola, (4/2004), 2004.
Borkowski Adam Hallmann Ireneusz. Correction of non-linear distortions of images. In Automation 2002. PIAP, 2002.
D. Marr and E. Hildreth. Theory of edge detection. Proc. of the Royal Society, B-207:187–217, 1980.
Rahul Swaminathan and Shree K. Nayar. Non-metric calibration of wide-angle lenses and polycameras.
Christopher D. Watkins, Alberto Sadun, and Stephen Marenka. Nowoczesne metody przetwarzania obrazu. Wydawnictwa Naukowo-Techniczne, 1995.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2005 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Hallmann, I. (2005). Detection of Rectangular Landmarks. In: Kurzyński, M., Puchała, E., Woźniak, M., żołnierek, A. (eds) Computer Recognition Systems. Advances in Soft Computing, vol 30. Springer, Berlin, Heidelberg. https://doi.org/10.1007/3-540-32390-2_46
Download citation
DOI: https://doi.org/10.1007/3-540-32390-2_46
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-25054-8
Online ISBN: 978-3-540-32390-7
eBook Packages: EngineeringEngineering (R0)