
Abstract
Occlusions play an important role in disparity and optical flow estimation, since matching costs are not available in occluded areas and occlusions indicate depth or motion boundaries. Moreover, occlusions are relevant for motion segmentation and scene flow estimation. In this paper, we present an efficient learning-based approach to estimate occlusion areas jointly with disparities or optical flow. The estimated occlusions and motion boundaries clearly improve over the state-of-the-art. Moreover, we present networks with state-of-the-art performance on the popular KITTI benchmark and good generic performance. Making use of the estimated occlusions, we also show improved results on motion segmentation and scene flow estimation.
E. Ilg and T. Saikia—Equal contribution.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


1 Introduction
When applying dense correspondences to higher level tasks, there is often the desire for additional information apart from the raw correspondences. The areas in one image that are occluded in the other image are important to get an indication of potentially unreliable estimates due to missing measurements. A typical approach to estimate occluded areas is by computing correspondences in both directions and verifying their consistency post-hoc. However, since occlusions and correspondences are mutually dependent [17, 32] and the presence of occlusions already negatively influences the correspondence estimation itself, post-processing is suboptimal and leads to unreliable occlusion estimates.
Another valuable extra information in disparity maps and flow fields are explicit depth and motion boundaries, respectively. Referring to the classic work of Black and Fleet [4], “motion boundaries may be useful for navigation, structure from motion, video compression, perceptual organization and object recognition”.
In this paper, we integrate occlusion estimation as well as depth or motion boundary estimation elegantly with a deep network for disparity or optical flow estimation based on FlowNet 2.0 [18] and provide these quantities explicitly as output. In contrast to many prior works, this leads to much improved occlusion and boundary estimates and much faster overall runtimes. We quantify this improvement directly by measuring the accuracy of the occlusions and motion boundaries. We also quantify the effect of this improved accuracy on motion segmentation.
Furthermore we improved on some details in the implementation of the disparity and optical flow estimation networks from [11, 18, 29], which gives us state-of-the-art results on the KITTI benchmarks. Moreover, the networks show good generic performance on various datasets if we do not fine-tune them to a particular scenario. While these are smaller technical contributions, they are very relevant for applications of optical flow and disparity. Finally, with state-of-the-art optical flow, disparity and occlusion estimates in place, we put everything together to achieve good scene flow performance at a high frame-rate, using only 2D motion information. Using our predicted occlusions as input, we present a network that learns to interpolate the occluded areas to avoid the erroneous or missing information when computing the motion compensated difference between two disparity maps for scene flow.
2 Related Work
Optical Flow Estimation with CNNs. Optical flow estimation based on deep learning was pioneered by Dosovitsky et al. [11], who presented an end-to-end trainable encoder-decoder network. The work has been improved by Ilg et al. [18], who introduced a stack of refinement networks. Ranjan and Black [34] focused on efficiency and proposed a much smaller network based on the coarse-to-fine principle. Sun et al. [42] extended this idea by introducing correlations at the different pyramid levels. Their network termed PWC-Net currently achieves state-of-the-art results. The coarse-to-fine approach, however, comes with the well-known limitation that the flow for small, fast-moving objects cannot be estimated. While this does not much affect the average errors of benchmarks, small objects can be very important for decisions in application scenarios.
Disparity Estimation with CNNs. For disparity estimation, Zbontar et al. [52] were the first to present a Siamese CNN for matching patches. Post-processing with the traditional SGM method [14] yielded disparity maps. Other approaches to augment SGM with CNNs were presented by [28, 38]. The first end-to-end learning framework was presented by Mayer et al. [29]. The network named DispNetC was derived from the FlowNetC of Dosovitskiy et al. [11] restricted to rectified stereo images. It includes a correlation layer that yields a cost volume, which is further processed by the network. Kendall et al. [21] presented GC-Net, which uses 3D convolutions to process the cost volume also along the disparity dimension and by using a differentiable softargmin operation. Pang et al. [31] extended DispNetC by stacking a refinement network on top, similar to FlowNet 2.0 [18], with the difference that the second network is posed in a residual setting. In this work we also make use of network stacks with up to three networks and use their residual refinement.
Occlusion Estimation. Occlusion and optical flow estimation mutually depend on each other and are thus a typical chicken-and-egg problem [17, 32]. Humayun et al. [16] determine occlusions post-hoc by training a classifier on a broad spectrum of visual features and precomputed optical flow. Pérez-Rúa et al. [32] do not require a dense optical flow field, but motion candidates, which are used to determine if a “plausible reconstruction” exists. Many other methods try to estimate optical flow and occlusions jointly. Leordeanu et al. [27] train a classifier based on various features, including the current motion estimate and use it repeatedly during energy minimization of the flow. Sun et al. [41] make use of superpixels and local layering for an energy formulation that is optimized jointly for layers, optical flow and occlusions. The most recent work from Hur et al. [17] uses consistency between forward and backward flows of two images, by integrating a corresponding constraint into an energy formulation. Since occlusions are directly related to changes in depth [12], it was quite common to consider them explicitly in disparity estimation methods [9, 12, 19, 44].
In this paper, we show that training a network for occlusion estimation is clearly beneficial, especially if the trained network is combined with a network formulation of disparity or optical flow estimation. We do not try to disentangle the chicken-and-egg problem, but instead solve this problem using the joint training procedure.
Depth and Motion Boundary Estimation. In many energy minimization approaches, depth or motion boundary estimation is implicitly included in the form of robustness to outliers in the smoothness constraint. Typically, these boundaries are not made explicit. An exception is Black and Fleet [4], who estimate translational motion together with motion boundaries. Motion boundaries are also explicit in layered motion segmentation approaches. Most of these assume a precomputed optical flow, and only few estimate the segmentation and the flow jointly [8, 40]. Leordeanu et al. [26] introduced a method for combined optimization of a boundary detector that also covers motion boundaries, while most other approaches make use of an external image boundary detector [1, 10]. Sundberg et al. [43] use gPb [1] and LDOF [6] to compute motion differences between regions adjacent to image boundaries. Weinzaepfel et al. [49] use a structured random forest trained on appearance and motion cues. Lei et al. [25] present a fully convolutional Siamese network that is trained on annotated video segmentation. Using only the video segmentation ground-truth for training, they are able to infer the motion of boundary points during inference. For disparity and depth boundaries, the problem is very similar and most of the above mentioned methods could be applied to disparities, too. Jia et al. [20] infer depth boundaries from color and depth images with a Conditional Random Field. In this paper, we obtain depth and motion boundaries also by a joint training procedure and by joint refinement together with occlusions and disparity or flow.
Scene Flow Estimation. Scene flow estimation was popularized for the first time by the work of Vedula et al. [45] and was later dominated by variational methods [15, 33, 47]. Vogel et al. [46] combined the task of scene flow estimation with superpixel segmentation using a piecewise rigid model for regularization. Schuster et al. [37] proposed a variational approach to interpolate sparse scene flow estimates from sparse matches. Behl et al. [3] proposed a 3D scene flow method, which exploits instance recognition and 3D geometry information to obtain improved performance in texture-less, reflective and fast moving regions.
In this paper, we investigate scene flow estimation based on estimating correspondences only, without the use of 3D geometry information. The only learning based approach in a similar setting was proposed by Mayer et al. [29], but did not perform similarly well.

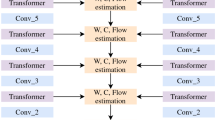
Overview of possible refinement stacks for flow, occlusions and motion boundaries. The residual connections are only shown in the first figure and indicated by + elsewhere. Aux. refers to the images plus a warped image for each input flow, respectively. Architectures for the disparity case are analogous.
3 Network Architectures
We investigate estimating occlusions and depth or motion boundaries with CNNs together with disparity and optical flow. To this end, we build upon the convolutional encoder-decoder architectures from FlowNet [11] and the stacks from FlowNet 2.0 [18]. Our modifications are shown in Fig. 1(a). For simplicity, in the following we mention the flow case. The disparity case is analogous.
In our version of [18], we leave away the small displacement network. In fact, the experiments from our re-implemented version show that the stack can perform well on small displacements without it. We still keep the former fusion network as it also performs smoothing and sharpening (see Fig. 1(a)). We denote this network by the letter “R” in network names (e.g. FlowNet-CSSR). This network is only for refinement and does not see the second image. We further modify the stack by integrating the suggestion of Pang et al. [31] and add residual connections to the refinement networks. As in [18], we also input the warped images, but omit the brightness error inputs, as these can easily be computed by the network.
Finally, we add the occlusions and depth or motion boundaries. While occlusions are important for refinement from the beginning, boundaries are only required in later refinement stages. Therefore we add the boundaries in the third network. Experimentally, we also found that when adding depth or motion boundary prediction in earlier networks, these networks predicted details better, but failed more rigorously in case of errors. Predicting exact boundaries early would be contrary to the concept of a refinement pipeline.
Generally, in an occluded area, the forward flow from the first to the second image does not match the backward flow from the second to the first image. If the forward flow is correctly interpolated into the occluded regions, it resembles the flow of the background object. Since this object is not visible in the second image, the backward flow of the target location is from another object and forward and backward flows are inconsistent. Many classical methods use this fact to determine occlusions.
We bring this into the network architecture from Fig. 1(b). In this version, we let the network estimate forward and backward flows and occlusions jointly. Therefore we modify FlowNetC to include a second correlation that takes a feature vector from the second image and computes the correlations to a neighborhood in the first image. We concatenate the outputs and also add a second skip connection for the second image. This setup is shown as FlowNetC-Bi in Fig. 1(b). Throughout the stack, we then estimate flow and occlusions in forward and backward directions.
In the third variant from Fig. 1(c), we model forward and backward flow estimation as separate streams and perform mutual warping to the other direction after each network. E.g., we warp the estimated backward flow after the first network to the coordinates of the first image using the forward flow. Subsequently we flip the sign of the warped flow, effectively turning it into a forward flow. The network then has the forward and the corresponding backward flow at the same pixel position as input.
Finally, we use our networks for flow and disparity to build a scene flow extension. For the scene flow task, the disparity at \(t=0\) is required and the flow is extended by disparity change [29] (resembling the change in the third coordinate). To compute this disparity change, one can estimate disparities at \(t=1\), warp them to \(t=0\) and compute the difference. However, the warping will be incorrect or undefined everywhere, where an occlusion is present. We therefore add the network shown in Fig. 1(d) to learn a meaningful interpolation for these areas given the warped disparity, the occlusions and the image.
4 Experiments
4.1 Training Data
For training our flow networks, we use the FlyingChairs [11], FlyingThings3D [29] and ChairsSDHom [18] datasets. For training the disparity networks, we only use the FlyingThings3D [29] dataset. These datasets do not provide the ground-truth required for our setting per-se. For FlyingChairs, using the code provided by the authors of [11], we recreate the whole dataset including also backward flows, motion boundaries and occlusions. For FlyingThings3D, depth and motion boundaries are directly provided. We use flow and object IDs to determine occlusions. For ChairsSDHom, we compute motion boundaries by finding discontinuities among object IDs and in the flow, by using a flow magnitude difference threshold of 0.75. To determine the ground-truth occlusions, we also use the flow and the object IDs.
4.2 Training Schedules and Settings
For training our networks, we also follow the data and learning rate schedules of FlowNet 2.0 [18]. We train the stack network by network, always fixing the already trained networks. Contrary to [18], for each step we only use half the number of iterations. The initial network is then a bit worse, but it turns out that the refinement can compensate for it well. We also find that the residual networks converge much faster. Therefore, we train each new network on the stack for 600k iterations on FlyingChairs and for 250k iterations on FlyingThings3D. Optionally, we follow the same fine-tuning procedure for small-displacements on ChairsSDHom as in [18] (we add “-ft-sd” to the network names in this case). We use the caffe framework and the same settings as in [18], with one minor modification: we found that numerically scaling the ground truth flow vectors (by a factor of \(\frac{1}{20}\)) yields noise for small displacements during optimization. We propose to change this factor to 1. Since these are all minor modifications, we present details in the supplemental material.
To train for flow and disparity, we use the normal EPE loss. For small displacement training we also apply the suggested non-linearity of [18]. To train for occlusions and depth or motion boundaries, we use a normal cross entropy loss with classes 0 and 1 applied to each pixel. To combine multiple losses of different kind, we balance their coefficients during the beginning of the training, such that their magnitudes are approximately equal.
4.3 Estimating Occlusions with CNNs
We first ran some basic experiments on estimating occlusions with a FlowNetS architecture and the described ground truth data. In the past, occlusion estimation was closely coupled with optical flow estimation and in the literature is stated as “notoriously difficult” [27] and a chicken-and-egg problem [17, 32]. However, before we come to joint estimation of occlusions and disparity or optical flow, we start with a network that estimates occlusions independently of the optical flow or with optical flow being provided as input.
In the most basic case, we only provide the two input images to the network and no optical flow, i.e., the network must figure out by itself on how to use the relationship between the two images to detect occluded areas. As a next step, we additionally provide the ground-truth forward optical flow to the network, to see if a network is able to use flow information to find occluded areas. Since a classical way to detect occlusions is by checking the consistency between the forward and the backward flow as mentioned in Sect. 3, we provide different versions of the backward flow: (1) backward flow directly; (2) using the forward flow to warp the backward flow to the first image and flipping its sign (effectively turning the backward flow into a forward flow up to the occluded areas); (3) providing the magnitude of the sum of forward and backward flows, i.e., the classical approach to detect occlusions. From the results of these experiments in Table 1, we conclude:
Occlusion Estimation without Optical Flow is Possible. In contrast to existing literature, where classifiers are always trained with flow input [16, 26, 27, 32] or occlusions are estimated jointly with optical flow [17, 41], we show that a deep network can learn to estimate the occlusions directly from two images.
Using the Flow as Input Helps. The flow provides the solution for correspondences and the network uses these correspondences. Clearly, this helps, particularly since we provided the correct optical flow.
Adding the Backward Flow Marginally Improves Results. Providing the backward flow directly does not help. This can be expected, because the information for a pixel of the backward flow is stored at the target location of the forward flow and a look-up is difficult for a network to perform. Warping the backward flow or providing the forward/backward consistency helps a little.
4.4 Joint Estimation of Occlusions and Optical Flow
Within a Single Network. In this section we investigate estimating occlusions jointly with optical flow, as many classical methods try to do [17, 41]. Here, we provide only the image pair and therefore can use a FlowNetC instead of a FlowNetS. The first row of Table 2 shows that just occlusion estimation with a FlowNetC performs similar to the FlowNetS of the last section. Surprisingly, from rows one to three of Table 2 we find that joint flow estimation neither improves nor deproves the flow or the occlusion quality. In row four of the table we additionally estimate the backward flow to enable the network to reason about forward/backward consistency. However, we find that this also does not affect performance much.
When finding correspondences, occlusions need to be regarded by deciding that no correspondence exists for an occluded pixel and by filling the occlusion area with some value inferred from the surroundings. Therefore, knowledge about occlusions is mandatory for correspondence and correct flow estimation. Since making the occlusion estimation in our network explicit does not change the result, we conclude that an end-to-end trained network for only flow already implicitly performs all necessary occlusion reasoning. By making it explicit, we obtain the occlusions as an additional output at no cost, but the flow itself remains unaffected.
4.5 With a Refinement Network
In the last section we investigated the joint estimation of flow and occlusions, which in the literature is referred to as a “chicken-and-egg” problem. With our first network already estimating flow and occlusions, we investigate if the estimated occlusions can help refine the flow (“if a chicken can come from an egg”).
To this end, we investigate the three proposed architectures from Sect. 2. We show the results of the three variants in Table 3. While the architectures from Fig. 1(a) and (c) are indifferent about the additional occlusion input, the architecture with joint forward and backward estimation performs worse.
Overall, we find that providing explicit occlusion estimates to the refinement does not help compared to estimating just the optical flow. This means, either the occluded areas are already filled correctly by the base network, or in a stack without explicit occlusion estimation, the second network can easily recover occlusions from the flow and does not require the explicit input.
We finally conclude that occlusions can be obtained at no extra cost, but do not actually influence the flow estimation, and that it is best to leave the inner workings to the optimization by using only the baseline variant (Fig. 1(a)). This is contrary to the findings from classical methods.

Qualitative results for occlusions. In comparison to other methods and the forward-backward consistency check, our method is able to capture very fine details.
4.6 Comparing Occlusion Estimation to Other Methods
In Tables 4 and 5 we compare our occlusion estimations to other methods. For disparity our method outperforms Kolmogorov et al. [24] for all except one scene. For the more difficult case of optical flow, we outperform all existing methods by far. This shows that the chicken-and-egg problem of occlusion estimation is much easier to handle with a CNN than with classical approaches [17, 24, 27, 44] and that CNNs can perform very well at occlusion reasoning. This is confirmed by the qualitative results of Fig. 2. While consistency checking is able to capture mainly large occlusion areas, S2DFlow [27] also manages to find some details. MirrorFlow [17] in many cases misses details. Our CNN on the other hand is able to estimate most of the fine details.
4.7 Motion Boundary Estimation
For motion boundary estimation we compare to Weinzaepfel et al. [49], which is to the best of our knowledge the best available method. It uses a random forest classifier and is trained on the Sintel dataset. Although we do not train on Sintel, from the results of Table 6, our CNN outperforms their method by a large margin. The improvement in quality is also very well visible from the qualitative results from Fig. 3.

Motion boundaries on Sintel train clean. Our approach succeeds to detect the object in the background and has less noise around motion edges than existing approaches (see green arrows). Weinzaepfel et al. detect some correct motion details in the background. However, these details are not captured in the ground-truth. (Color figure online)
4.8 Application to Motion Segmentation
We apply the estimated occlusions to the motion segmentation framework from Keuper et al. [22]. This approach, like [5], computes long-term point trajectories based on optical flow. For deciding when a trajectory ends, the method depends on reliable occlusion estimates. These are commonly computed using the post-hoc consistency of forward and backward flow, which was shown to perform badly in Sect. 4.6. We replace the occlusion estimation with the occlusions from our FlowNet-CSS. Table 7 shows the clear improvements obtained by the more reliable occlusion estimates on the common FBMS-59 motion segmentation benchmark. In row four, we show how adding our occlusions to flow estimations of FlowNet2 can improve results. This shows that by only adding occlusions, we recover 30 objects instead of 26. The last result from our flow and occlusions together further improve the results. Besides the direct quantitative and qualitative evaluation from the last sections, this shows the usefulness of our occlusion estimates in a relevant application. Our final results can produce results that are even better than the ones generated by the recently proposed third order motion segmentation with multicuts [23].
4.9 Benchmark Results for Disparity, Optical Flow, and Scene Flow
Finally, we show that besides the estimated occlusions and depth and motion boundaries, our disparities and optical flow achieve state-of-the-art performance. In Table 8 we show results for the common disparity benchmarks. We also present smaller versions of our networks by scaling the number of channels in each layer down to \(37.5\%\) as suggested in [18] (denoted by css). While this small version yields a good speed/accuracy trade-off, the larger networks rank second on KITTI 2015 and are the top ranked methods on KITTI 2012 and Sintel.
In Table 9 we show the benchmark results for optical flow. We perform on-par on Sintel, while we set the new state-of-the-art on both KITTI datasets.
In Table 10 we report numbers on the KITTI 2015 scene flow benchmark. The basic scene flow approach warps the next frame disparity maps into the current frame (see [36]) using forward flow. Out of frame occluded pixels cannot be estimated this way. To mitigate this problem we train a CNN to reason about disparities in occluded regions (see the architecture from Fig. 1(d)). This yields clearly improved results that get close to the state-of-the-art while the approach is orders of magnitude faster.
5 Conclusion
We have shown that, in contrast to traditional methods, CNNs can very easily estimate occlusions and depth or motion boundaries, and that their performance surpasses traditional approaches by a large margin. While classical methods often use the backward flow to determine occlusions, we have shown that a simple extension from the forward FlowNet 2.0 stack performs best in the case of CNNs. We have also shown that this generic network architecture performs well on the tasks of disparity and flow estimation itself and yields state-of-the-art results on benchmarks. Finally, we have shown that the estimated occlusions can significantly improve motion segmentation.
References
Arbelaez, P., Maire, M., Fowlkes, C., Malik, J.: Contour detection and hierarchical image segmentation. PAMI 33(5), 898–916 (2011)
Bailer, C., Varanasi, K., Stricker, D.: CNN-based patch matching for optical flow with thresholded hinge embedding loss. In: CVPR (2017)
Behl, A., Jafari, O.H., Mustikovela, S.K., Alhaija, H.A., Rother, C., Geiger, A.: Bounding boxes, segmentations and object coordinates: how important is recognition for 3D scene flow estimation in autonomous driving scenarios? In: International Conference on Computer Vision (ICCV) (2017)
Black, M.J., Fleet, D.J.: Probabilistic detection and tracking of motion boundaries. Int. J. Comput. Vis. 38(3), 231–245 (2000)
Brox, T., Malik, J.: Object segmentation by long term analysis of point trajectories. In: Daniilidis, K., Maragos, P., Paragios, N. (eds.) ECCV 2010. LNCS, vol. 6315, pp. 282–295. Springer, Heidelberg (2010). https://doi.org/10.1007/978-3-642-15555-0_21
Brox, T., Malik, J.: Large displacement optical flow: descriptor matching in variational motion estimation. PAMI 33(3), 500–513 (2011)
Butler, D.J., Wulff, J., Stanley, G.B., Black, M.J.: A naturalistic open source movie for optical flow evaluation. In: Fitzgibbon, A., Lazebnik, S., Perona, P., Sato, Y., Schmid, C. (eds.) ECCV 2012. LNCS, vol. 7577, pp. 611–625. Springer, Heidelberg (2012). https://doi.org/10.1007/978-3-642-33783-3_44
Cheng, J., Tsai, Y.H., Wang, S., Yang, M.H.: SegFlow: joint learning for video object segmentation and optical flow (2017)
Deng, Y., Yang, Q., Lin, X., Tang, X.: Stereo correspondence with occlusion handling in a symmetric patch-based graph-cuts model (2007)
Dollár, P., Zitnick, C.L.: Structured forests for fast edge detection (2013)
Dosovitskiy, A., et al.: FlowNet: learning optical flow with convolutional networks. In: IEEE International Conference on Computer Vision (ICCV) (2015)
Geiger, D., Ladendorf, B., Yuille, A.: Occlusions and binocular stereo. IJCV 14(3), 211–226 (1995)
Gidaris, S., Komodakis, N.: Detect, replace, refine: deep structured prediction for pixel wise labeling. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2017)
Hirschmüller, H.: Stereo processing by semiglobal matching and mutual information. PAMI 30(2), 328–341 (2008)
Huguet, F., Devernay, F.: A variational method for scene flow estimation from stereo sequences. In: 2007 IEEE 11th International Conference on Computer Vision, pp. 1–7, October 2007. https://doi.org/10.1109/ICCV.2007.4409000
Humayun, A., Aodha, O.M., Brostow, G.J.: Learning to find occlusion regions. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2011)
Hur, J., Roth, S.: MirrorFlow: exploiting symmetries in joint optical flow and occlusion estimation (2017)
Ilg, E., Mayer, N., Saikia, T., Keuper, M., Dosovitskiy, A., Brox, T.: FlowNet 2.0: evolution of optical flow estimation with deep networks. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2017)
Ishikawa, H., Geiger, D.: Global optimization using embedded graphs (2000)
Jia, Z., Gallagher, A., Chen, T.: Learning boundaries with color and depth (2013)
Kendall, A., et al.: End-to-end learning of geometry and context for deep stereo regression (2017)
Keuper, M., Andres, B., Brox, T.: Motion trajectory segmentation via minimum cost multicuts. In: ICCV (2015)
Keuper, M.: Higher-order minimum cost lifted multicuts for motion segmentation. In: The IEEE International Conference on Computer Vision (ICCV), October 2017
Kolmogorov, V., Monasse, P., Tan, P.: Kolmogorov and Zabih’s graph cuts stereo matching algorithm. Image Process. Line 4, 220–251 (2014). https://doi.org/10.5201/ipol.2014.97. https://hal-enpc.archivesouvertes.fr/hal-01074878
Lei, P., Li, F., Todorovic, S.: Joint spatio-temporal boundary detection and boundary flow prediction with a fully convolutional siamese network. In: CVPR (2018)
Leordeanu, M., Sukthankar, R., Sminchisescu, C.: Efficient closed-form solution to generalized boundary detection. In: Fitzgibbon, A., Lazebnik, S., Perona, P., Sato, Y., Schmid, C. (eds.) ECCV 2012. LNCS, vol. 7575, pp. 516–529. Springer, Heidelberg (2012). https://doi.org/10.1007/978-3-642-33765-9_37
Leordeanu, M., Zanfir, A., Sminchisescu, C.: Locally affine sparse-to-dense matching for motion and occlusion estimation. In: IEEE International Conference on Computer Vision (ICCV) (2013)
Luo, W., Schwing, A.G., Urtasun, R.: Efficient deep learning for stereo matching (2016)
Mayer, N., et al.: A large dataset to train convolutional networks for disparity, optical flow, and scene flow estimation. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2016)
Ochs, P., Malik, J., Brox, T.: Segmentation of moving objects by long term video analysis. IEEE TPAMI 36(6), 1187–1200 (2014)
Pang, J., Sun, W., Ren, J.S.J., Yang, C., Yan, Q.: Cascade residual learning: a two-stage convolutional neural network for stereo matching. In: IEEE International Conference on Computer Vision (ICCV) Workshop (2017)
Perez-Rua, J.M., Crivelli, T., Bouthemy, P., Perez, P.: Determining occlusions from space and time image reconstructions. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2016)
Quiroga, J., Brox, T., Devernay, F., Crowley, J.: Dense semi-rigid scene flow estimation from RGBD images. In: Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T. (eds.) ECCV 2014. LNCS, vol. 8695, pp. 567–582. Springer, Cham (2014). https://doi.org/10.1007/978-3-319-10584-0_37. https://hal.inria.fr/hal-01021925
Ranjan, A., Black, M.: Optical flow estimation using a spatial pyramid network. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2017)
Revaud, J., Weinzaepfel, P., Harchaoui, Z., Schmid, C.: EpicFlow: edge-preserving interpolation of correspondences for optical flow. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2015)
Schuster, R., Bailer, C., Wasenmüller, O., Stricker, D.: Combining stereo disparity and optical flow for basic scene flow. In: Berns, K. (ed.) Commercial Vehicle Technology 2018, pp. 90–101. Springer, Wiesbaden (2018). https://doi.org/10.1007/978-3-658-21300-8_8
Schuster, R., Wasenmüller, O., Kuschk, G., Bailer, C., Stricker, D.: SceneFlowFields: dense interpolation of sparse scene flow correspondences. In: IEEE Winter Conference on Applications of Computer Vision (WACV) (2018)
Seki, A., Pollefeys, M.: SGM-Nets: semi-global matching with neural networks (2017)
Shaked, A., Wolf, L.: Improved stereo matching with constant highway networks and reflective confidence learning. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2017)
Sun, D., Liu, C., Pfister, H.: Local layering for joint motion estimation and occlusion detection (2014)
Sun, D., Liu, C., Pfister, H.: Local layering for joint motion estimation and occlusion detection. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2014)
Sun, D., Yang, X., Liu, M.Y., Kautz, J.: PWC-Net: CNNs for optical flow using pyramid, warping, and cost volume. In: CVPR (2018)
Sundberg, P., Brox, T., Maire, M., Arbeláez, P., Malik, J.: Occlusion boundary detection and figure/ground assignment from optical flow. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2011)
Tan, P., Chambolle, A., Monasse, P.: Occlusion detection in dense stereo estimation with convex optimization. In: 2017 IEEE International Conference on Image Processing (ICIP), pp. 2543–2547, September 2017. https://doi.org/10.1109/ICIP.2017.8296741
Vedula, S., Baker, S., Rander, P., Collins, R., Kanade, T.: Three-dimensional scene flow. IEEE Trans. Pattern Anal. Mach. Intell. 27(3), 475–480 (2005). https://doi.org/10.1109/TPAMI.2005.63
Vogel, C., Schindler, K., Roth, S.: Piecewise rigid scene flow. In: 2013 IEEE International Conference on Computer Vision, pp. 1377–1384, December 2013. https://doi.org/10.1109/ICCV.2013.174
Wedel, A., Brox, T., Vaudrey, T., Rabe, C., Franke, U., Cremers, D.: Stereoscopic scene flow computation for 3D motion understanding. Int. J. Comput. Vis. 95(1), 29–51 (2011). https://doi.org/10.1007/s11263-010-0404-0
Weinzaepfel, P., Revaud, J., Harchaoui, Z., Schmid, C.: DeepFlow: large displacement optical flow with deep matching. In: ICCV - IEEE International Conference on Computer Vision, Sydney, Australia, pp. 1385–1392. IEEE, December 2013. https://doi.org/10.1109/ICCV.2013.175, https://hal.inria.fr/hal-00873592
Weinzaepfel, P., Revaud, J., Harchaoui, Z., Schmid, C.: Learning to detect motion boundaries. In: CVPR 2015 - IEEE Conference on Computer Vision & Pattern Recognition. Boston, United States, June 2015. https://hal.inria.fr/hal-01142653
Xu, J., Ranftl, R., Koltun, V.: Accurate optical flow via direct cost volume processing. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2017)
Yamaguchi, K., McAllester, D., Urtasun, R.: Efficient joint segmentation, occlusion labeling, stereo and flow estimation. In: Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T. (eds.) ECCV 2014. LNCS, vol. 8693, pp. 756–771. Springer, Cham (2014). https://doi.org/10.1007/978-3-319-10602-1_49
Zbontar, J., LeCun, Y.: Stereo matching by training a convolutional neural network to compare image patches. J. Mach. Learn. Res. 17(1–32), 2 (2016)
Acknowledgements
We acknowledge funding by the EU Horizon2020 project TrimBot2020 and by Gala Sports, and donation of a GPU server by Facebook. Margret Keuper acknowledges funding by DFG grant KE 2264/1-1.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
1 Electronic supplementary material
Below is the link to the electronic supplementary material.
Supplementary material 2 (avi 21944 KB)
Rights and permissions
Copyright information
© 2018 Springer Nature Switzerland AG
About this paper

Cite this paper
Ilg, E., Saikia, T., Keuper, M., Brox, T. (2018). Occlusions, Motion and Depth Boundaries with a Generic Network for Disparity, Optical Flow or Scene Flow Estimation. In: Ferrari, V., Hebert, M., Sminchisescu, C., Weiss, Y. (eds) Computer Vision – ECCV 2018. ECCV 2018. Lecture Notes in Computer Science(), vol 11216. Springer, Cham. https://doi.org/10.1007/978-3-030-01258-8_38
Download citation
DOI: https://doi.org/10.1007/978-3-030-01258-8_38
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-01257-1
Online ISBN: 978-3-030-01258-8
eBook Packages: Computer ScienceComputer Science (R0)