
Abstract
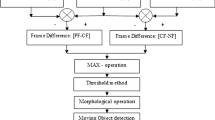
Detection technology for moving targets is an important direction in computer vision research. This paper proposes a method to improve moving target detection, which is a three-frame difference algorithm combining edge information. This difference algorithm can detect moving objects with high accuracy. For the real-time image captured by the camera, the algorithm not only can reduce the processing time, but also judge the moving object with the fastest speed and the highest accuracy. In the process of the algorithm, Expansion and corrosion in mathematical morphology are used to remove noise from images. Due to the detection of moving targets, there will inevitably be some interference factors, and these factors will have a more serious impact on the detection sample. In order to eliminate the influence of noise on the processing results, the algorithm first divides the image into binary image, expansion and corrosion treatment of the image, and then according to the different pixel points between the three frame images, the shape of the object can be determined by the information of space and time, so as to identify the moving object, give an alarm and save the image to the local area.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Qiu LK, Liu QL, Lei WL (2014) The motion detection based on background subtraction and three frame difference. J Hefei Univ Technol 5(37):572–577
Hua YL, Liu WJ (2014) Moving target detection algorithm based on improved mixed Gauss model. Comput Appl 34(2):580–584
Tong N, Duan X (2002) Research on detection algorithm for vehicle monitoring system. In: The first Chinese conference on intelligent surveillance, Beijing, pp 612–616
Fan W, Liu Y, Tang B (2016) Toward high efficiency for content-based multiattribute event matching via hybrid methods. Sci China (Inf Sci) 59(2):1–16
Morrison P, Zou JJ (2015) Inexact graph matching using a hierarchy of matching processes. Comput Vis Media 1(4):291–307
Zhao Y, Zhai Y, Dubois E, Wang S (2016) Image matching algorithm based on SIFT using color and exposure information. J Syst Eng Electron 27(3):691–699
Kim N-J, Lee H-J, Lee J-B (2008) Probabilistic global motion estimation based on Laplacian two-bit plane matching for fast digital image stabilization. EURASIP J Adv Signal Process 2008:180582
Ryu J-B, Lee C-G, Park H-H (2011) Formula for Harris corner detector. Electron Lett 47(3):180–181
Nájera Juan J, Fochesatto Javier G, Last Deborah J, Percival Carl J, Horn Andrew B (2009) Infrared spectroscopic methods for the study of aerosol particles using white cell optics: development and characterization of a new aerosol flow tube. Rev Sci Instrum 79(12):124102
Chai MC (2014) The complete extraction scheme of edge detection. Brand (9):169
Zheng JS (2008) The reach on extraction algorithm for vehicle edge based on adaptive threshold. J Shandong Jiaotong Univ 16(1):23–25
Tian P, Jin J, Li L et al (2007) A kind of biological characteristic recognition based on between-class variance and morphology. J Tsinghua Univ (Nat Sci) 47(z2):1747–1750
Acknowledgement
This work is supported by the Scientific Research Foundation of Inner Mongolia University for Nationalities (NMDYB1757).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Zhang, Z., Zhang, H., Zhang, Z. (2020). Using Three-Frame Difference Algorithm to Detect Moving Objects. In: Xu, Z., Choo, KK., Dehghantanha, A., Parizi, R., Hammoudeh, M. (eds) Cyber Security Intelligence and Analytics. CSIA 2019. Advances in Intelligent Systems and Computing, vol 928. Springer, Cham. https://doi.org/10.1007/978-3-030-15235-2_123
Download citation
DOI: https://doi.org/10.1007/978-3-030-15235-2_123
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-15234-5
Online ISBN: 978-3-030-15235-2
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)