
Abstract
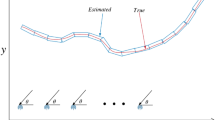
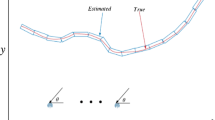
According to the characteristics of underwater target tracking, extended Kalman filter (EKF) algorithm was applied to underwater bearing-only and bearing-Doppler non-maneuverable target tracking problem. EKF is recursive Bayesian filter algorithm based on the linearization of the nonlinearities in the target state and the measurement equations. To ensure the observability in passive target tracking, we use single maneuvering observer. The simulation results show the suitability and effectiveness of the EKF algorithm to the single non-maneuverable target.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Arulampalam, M.S., Ristic, B., Gordon, N., Mansell, T.: Bearings-only tracking of maneuvering targets using particle filters. EURASIP J. Appl. Sig. Process. 15, 2351–2365 (2004)
Ristic, B., Arulampalam, M.S.: Tracking a maneuvering target using angle-only measurements: algorithms and performance. Sig. Process. 83, 1223–1238 (2003)
Foy, W.H.: Position-location solutions by Taylor series estimation. IEEE Trans. Aerosp. Electron. Syst. AES-12 2, 187–194 (1976)
Hassab, J.C.: Passive tracking of a moving source by a single observer in shadow water. J. Sound Vib. 44, 127–145 (1976)
Ristic, B., Arulampalam, M.S., Gordon, N.: Beyond the Kalman Filter. Artech House, Boston (2004)
Kalman, R.E.: A new approach to linear filtering and prediction problems. Trans ASME-J. Basic Eng. Autom. Control. 82, 35–45 (1960)
Li, X.H., Baum, M., Willett, P.: Evaluation of the PMHT approach for passive radar tracking with unknown transmitter associations. In: Proceedings of 17th International Conference on Information Fusion, Salamanca, pp. 1–7 (2014)
Song, T.L.: Observability of target tracking with bearings only measurements. IEEE Trans. Aerosp. Electron. Syst. 32, 1468–1471 (1996)
Acknowledgments
This work was supported by the National Natural Science Foundation of China (grant No. 61703333) and the National Key Research and Development Program of China (grant No. 2017YFB1402103).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Li, X., Zhao, C., Zhang, J., Li, X. (2019). Bearing-Only and Bearing-Doppler Target Tracking Based on EKF. In: El Rhalibi, A., Pan, Z., Jin, H., Ding, D., Navarro-Newball, A., Wang, Y. (eds) E-Learning and Games. Edutainment 2018. Lecture Notes in Computer Science(), vol 11462. Springer, Cham. https://doi.org/10.1007/978-3-030-23712-7_32
Download citation
DOI: https://doi.org/10.1007/978-3-030-23712-7_32
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-23711-0
Online ISBN: 978-3-030-23712-7
eBook Packages: Computer ScienceComputer Science (R0)