
Abstract
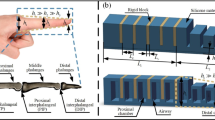
This paper presents a novel dual-drive soft pneumatic network actuator consisting of a series of chambers made of elastomeric material, an inextensible bottom layer (paper), the rigid parts, the tendon, and coffee granular cavity. The soft actuator is the most important part when establishing soft robotic systems and can be used to make the soft gripper. The fabrication process of the soft actuator is presented. The proposed actuator has the design of the decreasing chamber height, which is beneficial to improving the output force and the contact area with the object. The proposed actuator has a cavity filled with coffee granular in the bottom, which improves the contact area and grasping stability. The tendon-pneumatic dual-drive and rigid parts between the adjacent chambers increase the force of the soft actuator. The bending angle model of the soft actuator is established briefly based on the elongation of the spacing layer and the contact layer of the soft actuator. The experiments prove that the proposed actuator has the significant improved output force.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Lee, C., et al.: Soft robot review. Int. J. Control Autom. Syst. 15(1), 3–15 (2017)
Trimmer, B.: Soft robots. Curr. Biol. 23(15), R639–R641 (2013)
Yap, H., Ng, H., Yeow, C.: High-force soft printable pneumatics for soft robotic applications. Soft Robot. 3(3), 144–158 (2016)
Glick, P., Suresh, S.A., Ruffatto, D., Cutkosky, M., Tolley, M.T., Parness, A.: A soft robotic gripper with gecko-inspired adhesive. IEEE Robot. Autom. Lett. 3(2), 903–910 (2018)
Zhou, J., Chen, S., Wang, Z.: A soft-robotic gripper with enhanced object adaptation and grasping reliability. IEEE Robot. Autom. Lett. 2(4), 2287–2293 (2017)
Ranzani, T., Gerboni, G., Cianchetti, M., Menciassi, A.: A bioinspired soft manipulator for minimally invasive surgery. Bioinspir. Biomim. 10(3), 035008 (2015)
Mosadegh, B., et al.: Pneumatic networks for soft robotics that actuate rapidly. Adv. Funct. Mater. 24(15), 2163–2170 (2014)
Nikolov, S., Kotev, V., Kostadinov, K., Wang, F., Liang, C., Tian, Y.: Model-based design optimization of soft fiber-reinforced bending actuators. In: Proceedings of the IEEE 3M-NANO, pp. 136–140 (2016)
Chun, C., Hannaford, B.: Measurement and modeling of McKibben pneumatic artificial muscles. IEEE Trans. Robot. Autom. 12(1), 90–102 (1996)
Li, Y., Chen, Y., Yang, Y., Wei, Y.: Passive particle jamming and its stiffening of soft robotic grippers. IEEE Trans. Robot. 33(2), 446–455 (2017)
Kim, Y.J., Cheng, S., Kim, S., Iagnemma, K.: A novel layer jamming mechanism with tunable stiffness capability for minimally invasive surgery. IEEE Trans. Robot. 29(4), 1031–1042 (2013)
https://softroboticstoolkit.com/. Accessed 27 Apr 2019
Manti, M., Hassan, T., Passetti, G., D’Elia, N., Laschi, C., Cianchetti, M.: A bioinspired soft robotic gripper for adaptable and effective grasping. Soft Robot. 2(3), 107–116 (2015)
Camarillo, D.B., Milne, C.F., Carlson, C.R., Zinn, M.R., Salisbury, J.K.: Mechanics modeling of tendon-driven continuum manipulators. IEEE Trans. Robot. 24(6), 1262–1273 (2008)
Mutlu, R., Yildiz, S.K., Alici, G., Panhuis, M.I.H., Spinks, G.M.: Mechanical stiffness augmentation of a 3D printed soft prosthetic finger. In: IEEE International Conference on Advanced Intelligent Mechatronics (AIM), pp. 7–12 (2016)
Al Abeach, L.A.T., Nefti-Meziani, S., Davis, S.: Design of a variable stiffness soft dexterous gripper. Soft Robot 4(3), 274–284 (2017)
Park, W., Seo, S., Bae, J.: A hybrid gripper with soft material and rigid structures. IEEE Robot. Autom. Lett. 4(1), 65–72 (2019)
Acknowledgement
This research is supported by National Natural Science Foundation of China (Grant nos. 51675376, 51675371 and 51675367). National Key R&D Program of China (nos. 2017YFB1104700, 2017YFE0112100, and 2016YFE0112100), Science & Technology Commission of Tianjin Municipality (Grant no. 18PTZWHZ00160), China-EU H2020 MNR4SCell (no. 734174).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Liu, S. et al. (2019). A Novel Dual-Drive Soft Pneumatic Actuator with the Improved Output Force. In: Yu, H., Liu, J., Liu, L., Ju, Z., Liu, Y., Zhou, D. (eds) Intelligent Robotics and Applications. ICIRA 2019. Lecture Notes in Computer Science(), vol 11742. Springer, Cham. https://doi.org/10.1007/978-3-030-27535-8_2
Download citation
DOI: https://doi.org/10.1007/978-3-030-27535-8_2
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-27534-1
Online ISBN: 978-3-030-27535-8
eBook Packages: Computer ScienceComputer Science (R0)