
Abstract
Percutaneous Coronary Intervention (PCI) is a non-surgical approach used to open narrowed coronary arteries and restore arterial blood flow to heart tissue. During a PCI procedure, the clinician uses X-ray fluoroscopy to visualize and guide the catheter, guidewire, and other devices (e.g. angioplasty balloons and stents). Robot-assisted PCI could potentially reduce the radiation exposure of operators and provide a more ergonomic workflow. However, modeling and controlling of the guidewire remains challenging because of the interplay of guidewire motions, the tip properties (e.g., loads, coating), and the local cross-sectional area of the vessel lumen (e.g, stenosis) and results in a highly non-linear system. Thus, robot-assisted PCI devices are still passively controlled by human operators at the cockpit. In this paper, we introduce methods to generate distal guidewire motions that take advantage of the fast response of a robotic system and which may be difficult to generate by a human hand. The fundamental motions that a robot can use to control the movement and direction of the guidewire are rotation and pushing/retracting, from the proximal end of the guidewire outside the insertion point on the patient’s body. We begin by investigating combinations of these fundamental motions under structured environmental settings and conduct a systematic empirical comparison of task completion time for a given setting. We then demonstrate improved dynamic behavior motions for a soft guidewire, which shows a promising speed-up by \(33\%\) and \(44\%\) for two difficult stenosis cases.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
References
Kini, A., Sharma, S., Narula, J.: Practical Manual of Interventional Cardiology. Springer, New York (2014)
Maor, E., Eleid, M.F., Gulati, R., Lerman, A., Sandhu, G.S.: Current and future use of robotic devices to perform percutaneous coronary interventions: a review. J. Am. Heart Assoc. 6(7), e006239 (2017)
Schröder, J.: The mechanical properties of guidewires. Part I: stiffness and torsional strength. Cardiovasc. Intervent. Radiol. 16, 43–46 (1993)
Liau, C.-S., Ho, S.-G., Chen, S.-N., Yang, L.-F.: A new guidewire technique for difficult cardiac catheterization. Cardiology 97, 24–28 (2001)
Dash, D.: Guidewire crossing techniques in coronary chronic total occlusion intervention: A to Z. Indian Heart J. 68, 410–420 (2016)
Konings, M.K., van de Kraats, E.B., Alderliesten, T., Niessen, W.J.: Analytical guide wire motion algorithm for simulation of endovascular interventions. Med. Biol. Eng. Comput. 41(6), 689–700 (2003)
Luboz, V., Blazewski, R., Gould, D., Bello, F.: Real-time guidewire simulation in complex vascular models. Vis. Comput. 25(9), 827–834 (2009)
Tang, W., Wan, T.R., Gould, D.A., How, T., John, N.W.: A stable and real-time nonlinear elastic approach to simulating guidewire and catheter insertions based on cosserat rod. IEEE Trans. Biomed. Eng. 59(8), 2211–2218 (2012)
Wang, H., Wu, J., Wei, M., Ma, X.: A robust and fast approach to simulating the behavior of guidewire in vascular interventional radiology. Comput. Med. Imag. Graph. 40, 160–169 (2015)
He, B., Xu, S., Ding, A., Zhou, Y.: Analysis of rotation angles and motions of the flexible mechanisms in bifurcated blood vessels. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 231(8), 747–757 (2017)
Sharei, H., Alderliesten, T., van den Dobbelsteen, J.J., Dankelman, J.: Navigation of guidewires and catheters in the body during intervention procedures: a review of computer-based models. J. Med. Imag. 5(1), 010902 (2018)
Shell, D.A., Matarić, M.J.: Behavior-based methods for modeling and structuring control of social robots. In: Sun, R. (ed.) Cognition and Multi-Agent Interaction: From Cognitive Modeling to Social Simulation, Chap. 11. Cambridge University Press, Cambridge (2005)
P.C. for Agile Semi-Autonomous Ground Vehicles using Motion Primitives, “Predictive Control for Agile Semi-Autonomous Ground Vehicles using Motion Primitives”. In: Proceedings of American Control Conference, Montréal, Canada, June 2012
Paranjape, A.A., Meier, K.C., Shi, X., Chung, S.-J., Hutchinson, S.: Motion primitives and 3D path planning for fast flight through a forest. Int. J. Robot. Res. 34(3), 357–377 (2015)
Kim, Y.-H., Shell, D.A.: Using a compliant, unactuated tail to manipulate objects. IEEE Robot. Autom. Lett. 2(1), 223–230 (2017)
Kim, Y.-H., Kapoor, A., Finocchi, R., Girard, E.: Evaluation of high-speed dynamic motions for robotic guidewire crossing techniques. In: Proceedings of Hamlyn Symposium on Medical Robotics, London, United Kingdom, June 2018
Madder, R., Lombardi, W., Parikh, M., Kandzari, D., Grantham, J., Rao, S.: Impact of a novel advanced robotic wiring algorithm on time to wire a coronary artery bifurcation in a porcine model. J. Am. Coll. Cardiol. 70(80) (2017)
LaValle, S.M.: Planning Algorithms. Cambridge University Press, New York (2006)
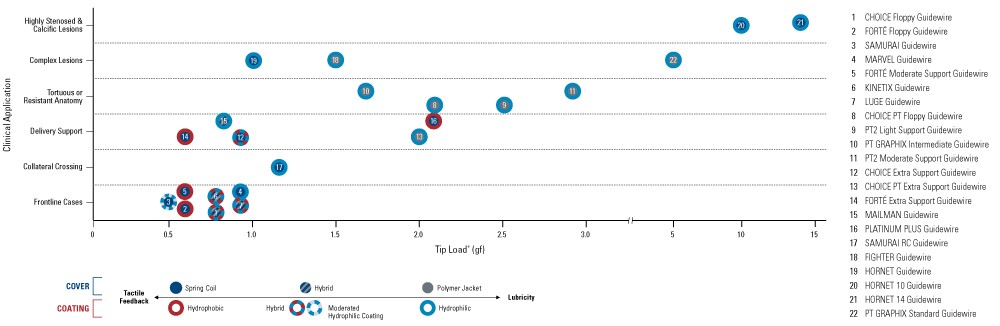
Boston Scientific: Guidewire Family of Products (2018). http://www.bostonscientific.com/content/gwc/en-US/products/guidewires/choice-floppy-guide-wire/_jcr_content/maincontent-par/image_1.img.MTC_Guidewire-chart.jpg
Rafii-Tari, H., Liu, J., Payne, C.J., Bicknell, C., Yang, G.-Z.: Hierarchical HMM based learning of navigation primitives for cooperative robotic endovascular catheterization. In: Proceedings of Medical Image Computing and Computer-Assisted Intervention (MICCAI), Boston, USA, September 2014
Acknowledgement
This feature is based on research, and is not commercially available. Due to regulatory reasons its future availability cannot be guaranteed.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

{kind=link}
Cite this paper
Kim, YH., Kapoor, A., Finocchi, R., Girard, E. (2020). An Experimental Validation of Behavior-Based Motions for Robotic Coronary Guidewire Crossing Techniques. In: Xiao, J., Kröger, T., Khatib, O. (eds) Proceedings of the 2018 International Symposium on Experimental Robotics. ISER 2018. Springer Proceedings in Advanced Robotics, vol 11. Springer, Cham. https://doi.org/10.1007/978-3-030-33950-0_2
Download citation
DOI: https://doi.org/10.1007/978-3-030-33950-0_2
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-33949-4
Online ISBN: 978-3-030-33950-0
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)