
Abstract
Vehicle detection based on UAV video is a typical small object detection task. In recent years, multi-scale prediction framework has become one of key steps for small object detection. However, the performances of existing methods are still not satisfactory for small object detection. In this paper, inspired by that the scale of object has an impact on gradient descent in the deep learning process, we choose the intersection over union (IOU) as the evaluation metric to analyze the relationship between scale of objects and gradient. We have shown that the gradient adjustment methods should satisfy some rules and thus we propose a new gradient adjustment formula based on our analysis. In addition, we built a mixed small vehicle dataset based on UAV videos for better evaluation of small vehicle detection. In the comparison with existing methods, our proposed method has achieved better results. The performance of our method reveals the potential of scale adaptive gradient descent method.
The author of this paper is a student.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
He, K., Zhang, X., Ren, S., et al.: Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 37(9), 1904–1916 (2014)
Liu, W., et al.: SSD: single shot multibox detector. In: Leibe, B., Matas, J., Sebe, N., Welling, M. (eds.) ECCV 2016. LNCS, vol. 9905, pp. 21–37. Springer, Cham (2016). https://doi.org/10.1007/978-3-319-46448-0_2
Simonyan, K., Zisserman, A.: Very deep convolutional networks for large-scale image recognition. In: NIPS (2015)
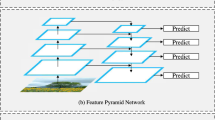
Lin, T.Y., Dollár, P., Girshick, R., et al.: Feature pyramid networks for object detection. In: CVPR (2017)
Zhao, Q., Sheng, T., Wang, Y., et al.: M2Det: a single-shot object detector based on multi-level feature pyramid network. In: AAAI (2019)
Tian, Z., Shen, C., Chen, H., et al.: FCOS: fully convolutional one-stage object detection. https://arxiv.org/abs/1904.01355. Accessed 14 Apr 2019
Pang, J., Chen, K., Shi, J., et al.: Libra R-CNN: towards balanced learning for object detection. In: CVPR (2019)
Li, Z., Peng, C., Yu, G., Zhang, X., Deng, Y., Sun, J.: DetNet: design backbone for object detection. In: Ferrari, V., Hebert, M., Sminchisescu, C., Weiss, Y. (eds.) ECCV 2018. LNCS, vol. 11213, pp. 339–354. Springer, Cham (2018). https://doi.org/10.1007/978-3-030-01240-3_21
Hsieh, M.R., Lin, Y.L., Hsu, W.H.: Drone-based object counting by spatially regularized regional proposal network. In: CVPR (2017)
Li, J., Liang, X., Wei, Y., et al.: Perceptual generative adversarial networks for small object detection. In: CVPR (2017)
Razakarivony, S., Jurie, F.: Vehicle detection in aerial imagery: a small target detection benchmark. J. Vis. Commun. Image Represent. 34, 187–203 (2016)
Geiger, A., Lenz, P., Stiller, C., et al.: Vision meets robotics: the KITTI dataset. Int. J. Robot. Res. 32(11), 1231–1237 (2013)
Zhu, H., Chen, X., Dai, W., et al.: Orientation robust object detection in aerial images using deep convolutional neural network. In: ICIP (2015)
Redmon, J., Divvala, S., Girshick, R., et al.: You only look once: unified, real-time object detection. In: CVPR (2016)
Redmon, J., Farhadi, A.: YOLOv3: an incremental improvement. In: CVPR (2018)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Feng, C., Lian, Z. (2019). A Novel Small Vehicle Detection Method Based on UAV Using Scale Adaptive Gradient Adjustment. In: Cui, Z., Pan, J., Zhang, S., Xiao, L., Yang, J. (eds) Intelligence Science and Big Data Engineering. Visual Data Engineering. IScIDE 2019. Lecture Notes in Computer Science(), vol 11935. Springer, Cham. https://doi.org/10.1007/978-3-030-36189-1_31
Download citation
DOI: https://doi.org/10.1007/978-3-030-36189-1_31
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-36188-4
Online ISBN: 978-3-030-36189-1
eBook Packages: Computer ScienceComputer Science (R0)