
Abstract
Digital Twins enable the analysis of systems under real world conditions using multiphysics models, sensors and bidirectional data connections between the digital and its physical twin. At the Research Lab of the Department of Computer Integrated Design (DiK) of Technische Universität Darmstadt, a Digital Twin demonstrator was developed that enables a motion-structural simulation of a bending beam test bench. The approach provides proof of many of the claimed benefits and challenges through a comprehensible Digital Twin system.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Digital Twins (DT) constitute virtual representations of physically existent systems [1]. The exchange of data between digital and physical twin takes place through bidirectional data connections [2]. The networking of technical systems, also called cyber-physical systems (CPS), is one of the key tasks of the digitization of industrial production, which in Germany is being promoted under the term Industrie 4.0 [3]. CPS use embedded electronics, software, sensors, actuators, and network connectivity to collect, process, and communicate data about their condition or behavior over wired or wireless networks [4]. The ability to communicate allows the synchronization of physical and virtual space and thus forms the basis for the creation of Digital Twins. The transmitted data regarding state, behavior, or environment serve as input to multidimensional, physical models that make up the Digital Twin.
The use of physical data collected by sensors in real space enables Digital Twins to reproduce and analyze real conditions, to respond to changes, to optimize the operation of the system, and thus generate added value for the product usage phase [5]. The processing of the data is hereby not accomplished using classical methods of data processing, but with methods of computer-aided technologies (CAx). This brings several advantages. The current state or the current behavior of the real system can be visualized using the model. This allows a much more efficient conceptualization of the situation by humans compared to a description through numbers and letters [6]. In addition, the visualization of the Digital Twin facilitates the comparison of both the current state with the desired state and all the past states stored. And lastly, visualization allows for more effective collaboration between multiple individuals, as all share the same conceptualization and are not dependent on individual interpretation [6]. These advantages are already used in product development with the help of the computer-aided design (CAD). In addition, the advantages of computer-aided engineering, in particular simulation and optimization, should also be borne by the Digital Twin to the product usage phase.
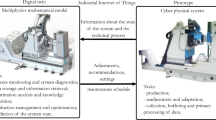
The Digital Twin allows the simulation of a system based on its real geometry, i.e. taking into account manufacturing deviations, wear and maintenance of individual components, which will increase the accuracy of the simulation in terms of behavior and in particular failure. Furthermore, through the data connection between digital and physical twin actual environmental data can be included in the simulation, which increases its accuracy in regard to the actual usage behavior of the system compared to predefined simulation scenarios [7]. The bidirectionality of the data connection also allows the control of the actuators of the physical system based on the calculated optimization results of the simulation. Ultimately, the Digital Twin forms an integral part of future autonomous systems [7]. Figure 1 summarizes the aforementioned benefits.

Benefits of digital twins
The aim of this project is to demonstrate the application of Digital Twins using a cyber-physical bending beam test bench connected to a motion-structural model of the system, its Digital Twin. The demonstrator is located at the Research Lab of the Department of Computer Integrated Design of Technische Universität Darmstadt but can be accessed via a secure connection by any internet-capable device from anywhere in the world.
2 Test Bed Development
The test bed was developed in two phases. In the first phase the physical bending beam test bench was developed and connected to an Internet of Things (IoT) platform and a CAD system using different application programming interfaces (API). In the second phase a fully functional motion-structural simulation model of the test bench was developed and integrated into the system.
In step one of phase one, a simple bending beam test bench was developed. The bending beam was chosen because its physics are easily comprehensible thus making it ideal to demonstrate the potentials of Digital Twin technology. The test bench (see Fig. 2) represents the physical twin in this cyber-physical system. It consists of two linear actuators that can move independently from another in the vertical direction. In between the two actuators a bending beam is clamped. Two load cells are integrated into the holding fixture on one side. They measure the resulting force acting on the bending beam after displacement. The displacement is calculated as the difference between the actuator positions. The control unit is set atop the frame.

Model of the developed bending beam test bench
In step two, the mechatronic test bench was transformed into a cyber-physical system by adding a microprocessor and a communication interface. Through the communication interface the test bench was connected to an IoT platform using the Message Queuing Telemetry Transport (MQTT) protocol. MQTT is an open messaging protocol based on a publish-subscribe architecture [8]. Upon connection, clients can publish messages to a broker under hierarchically defined topics. The broker saves the messages and forwards them to other clients who subscribe to this topic. The three clients in the test bed architecture are: the physical test bench, the IoT platform and the application programming interface of the CAD system.
The bending beam test bench publishes the position of each linear actuator as well as the force measured by the load cells. The IoT platform subscribes to these topics and collects the data. This sensor data is also visualized on a browser-based dashboard. Through this dashboard, the user can also control the physical demonstrator. Analogously to the sensor data, the control data is published to the broker who forwards it to the subscribing test bench. The dashboard can be accessed by any authorized device connected to the internet. Figure 3 visualizes the interaction between the single components of the test bed.

Architecture of Digital Twin system
In step three, an isolated finite element analysis (FEA) model of the bending beam was modelled and also connected to the broker through the API of the CAD system. The analysis using the finite element method is done in the CAD system. The resulting geometry model forms the reference geometry on which the process chain is based. The solid model is transformed into a finite element model by generating a finite element mesh. In addition, the body is assigned material properties and loads as well as constraints. During the subsequent processing, the finite element problem is solved with the help of a solver. In post processing, the results of the calculation are prepared in graphical form for evaluation and interpretation. The FEA model represented the Digital Twin in the first phase of the project. At this point, a human user could run a bending beam test through the dashboard on both the physical system as well as the Digital Twin using any internet capable device. To start the experiment the dashboard is opened in a browser. Either the resulting force on the beam or the final displacement of the beam are put in as parameters. Pushing the Run complete test button sends the variables to the broker who distributes them to the physical twin, which then moves to the selected position until either the displacement or the force is reached and measures the other variable respectively. The variable is then sent back to the broker who forwards it to the Digital Twin and the IoT platform. The Digital Twin uses the real force or displacement values to start a fully automated FEA. The necessary inputs for the finite element calculations are predefined in this use case. However, it is possible to consider them as variables and query them from the user through the dashboard or from the physical twin through a scenario-based logic. After completion, the calculated results are pushed back to the IoT platform through the broker where they can be compared to the physical results [9].
In phase two, a motion-structural analysis model of the entire test bench was developed (see Fig. 4). Motion-structural analyses combine the process chains of multi-body simulation (MBS) and finite element analysis (FEA). MBS calculate the dynamic movement of an assembly and are used to determine motion sequences, joint positions and collision areas under the consideration of the physical constraints. Originally, in MBS elastostatics of individual components are neglected [10]. However, in motion-structural analyses, the motion simulation calculates reaction forces and loads on the individual components, which then serve as input into a structural FEA. The additional chaining provides more accurate component strength results than pure FEA under self-defined load cases and increases the understanding of the performance of components in their operating environment. The motion-structural model was similarly connected to the broker through the CAD system’s API. The operator can now control the actuators individually and the Digital Twin will mirror the behavior of its physical twin as well as visualize additional data, such as actual stress and deformation characteristics during usage. Figure 4 shows the result of a motion-structural analysis of the test bench. The beam was bent by driving the right linear actuator upward through the simulation of the multi-body-system. The FEA calculates and visualizes the resulting deformation.

Motion-structural analysis
3 Results and Discussion
As with the first phase of the project, the intention of the test bed is not to examine the deviation between real and virtual measurements. It is to demonstrate the concept of the Digital Twin. In the first phase, the virtual counterpart of the bending beam test bench only consisted of an isolated FEA model of the beam itself. In a bending beam test, this is where the focus of the analysis lies. However, representing the entire test bench in a motion-structural model opens up a wider range of benefits of the Digital Twin as described in Sect. 1.
Users can visualize the current state of the entire physical system. This is helpful whenever the system itself is not in sight. The conceptualization through a three-dimensional model is much more powerful than looking at numbers, reports and other symbolic information. This also helps the user to compare the current state to the intended state more easily. Lastly, multiple users share the same conceptualization, making it easier for them discuss it and solve potential problems together. Through technologies such as augmented and virtual reality the Digital Twin can be brought to the factory floor or any environment where a system is deployed assisting workers or maintenance personnel.
Using physics-based models throughout the product usage phase extends the concept of Model-Based Systems Engineering (MBSE) beyond the product development phase. Thus, simulation of three-dimensional physics-based models becomes available during product use. To increase the accuracy of the simulation models, as-manufactured geometries as well as wear can be taken into account. A full overview of the system can be generated by a combination of virtual and real sensors. In the demonstrated use case, a real sensor is represented by the load cells in the physical system to measure the force acting on the beam. In order to measure the strain within the beam or the displacement of the beam along its length, a variety of additional sensors would have to be installed, possibly impacting the behavior of the beam itself. Through the simulation of the test bench the strain within the beam is calculated and visualized. The FEA model hereby acts as a virtual sensor, depicting either strain or displacement graded by color.
The bidirectional connecting between the physical and the digital twin allows, per definition, data transfer from the physical to the digital as well as from the digital to physical. An optimization of the bending beam can be calculated using its Digital Twin. The result of the calculation of the optimal state are the control variables, in the presented use case the position of the linear actuators. Through the bidirectional connection, the Digital Twin can move the physical actuators to the calculated positions, achieving an optimal state of the physical system through a physics-based simulation.
For all the benefits of Digital Twins highlighted in literature, they must always be weighed against the expense of creating and maintaining this complex virtual artefact. The bending beam test bench is a simple physical system. Creating a Digital Twin to this simple system took many hours of development and very exclusive expertise. To make Digital Twins a viable option for the future, the process chain CAD-DT needs to be formally specified. Furthermore, the operation of a fully functional Digital Twin is accompanied with significant costs. These include license fees for modeling and simulation software as well as hardware costs for memory and processing power. In the presented use case a state-of-the-art workstation was used to calculate the simulations. Still, the calculation was the limiting factor of the Digital Twin operation. Quickly changing states could not be realized because the time needed for the calculation averaged at 37 s. More complex virtual representations will therefore require much more powerful computing hardware in order to gain real-time capabilities.
4 Conclusion
In summary, the concept of the Digital Twin has evolved greatly in recent years from a NASA and U.S. Air Force research project. There is a variety of benefits to be gained from implementing Digital Twins to physical systems. Most notably, Digital Twins carry the advantages of Model-Based Systems Engineering to the product usage phase. Simulation and optimization based on physical models paired with real environment data enhances insight into system operation and lays the foundation for model-based control of future autonomous systems. However, the deployment of Digital Twins is also accompanied by many challenges and costs. The development and operation of the virtual counterpart requires specialized knowledge, expensive simulation software and powerful computing performance.
The benefits and challenges of the Digital Twin concept could both be demonstrated in this project using a bending beam test bench. A motion-structural model to the physical system was developed and simulated, illustrating the added value of a three-dimensional virtual model mirroring a physical system’s behavior. The performance of the applied hardware represented the limiting factor of the entire Digital Twin system. The calculation of the simulation required more than half a minute making the system far from real-time capable.
References
Shafto, M., et al.: Modeling, simulation, information technology & processing roadmap. Technol. Area 11 (2010)
Grieves, M.: Virtually Perfect: Driving Innovative and Lean Products Through Product Lifecycle Management. Space Coast Press, Cocoa Beach (2011)
BITKOM, VDMA, ZVEI (eds.): Umsetzungsstrategie Industrie 4.0: Ergebnisbericht der Plattform Industrie 4.0 (2015)
Lee, E.A.: Cyber physical systems: design challenges (2008)
Anderl, R., Haag, S., Schützer, K., Zancul, E.: Digital twin technology – an approach for industrie 40 vertical and horizontal lifecycle integration. IT – Inform. Technol. 60(3), 125–132 (2018)
Grieves, M.: Digital twin: manufacturing excellence through virtual factory replication (2014)
Boschert, S., Rosen, R.: Digital Twin - The Simulation Aspect. In: Hehenberger, P., Bradley, D. (eds.) Mechatronic Futures, pp. 59–74. Springer, Cham (2016). https://doi.org/10.1007/978-3-319-32156-1_5
Trojan, W.: Das MQTT-Praxisbuch, 1st edn. Elektor-Verlag GmbH, Aachen (2017)
Haag, S., Anderl, R.: Digital twin – Proof of concept. Manuf. Lett. 15, 64–66 (2018)
Anderl, R., Binde, P.: Simulationen mit NX/Simcenter 3D. Carl Hanser Verlag GmbH & Co. KG, München (2017)
Acknowledgments
The demonstrator is part of the project “Smart Components within Smart Production Processes and Environments (SCoPE)” within the Brazilian-German Collaborative Research Initiative on Smart Connected Manufacturing (BRAGECRIM) funded by DFG. Other institutes involved in this project are the Laboratory for Computer Integrated Design and Manufacturing of the Methodist University of Piracicaba and the Department of Production Engineering of the Polytechnic School of the University of Sao Paulo.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 IFIP International Federation for Information Processing
About this paper

Cite this paper
Haag, S., Anderl, R., Schützer, K., Zancul, E. (2019). Motion-Structural Analysis of Systems Using Digital Twins. In: Fortin, C., Rivest, L., Bernard, A., Bouras, A. (eds) Product Lifecycle Management in the Digital Twin Era. PLM 2019. IFIP Advances in Information and Communication Technology, vol 565. Springer, Cham. https://doi.org/10.1007/978-3-030-42250-9_23
Download citation
DOI: https://doi.org/10.1007/978-3-030-42250-9_23
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-42249-3
Online ISBN: 978-3-030-42250-9
eBook Packages: Computer ScienceComputer Science (R0)