
Abstract
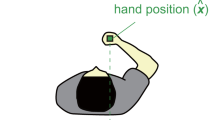
This study assessed the hand force exerted to a fixed controlled object under three conditions with the dominant and non-dominant hand. The position, velocity, and acceleration of a visual indicator were determined by the exerted hand force and the participants were asked to move the indicator to a target position. Our findings indicated that the non-dominant hand had an advantage when an appropriate magnitude and time interval was required while the dominant hand had an advantage in the pseudo-natural condition. These findings could be applied to the designing of devices and interfaces.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Flash, T., Hogan, N.: The coordination of arm movements: an experimentally confirmed mathematical model. J. Neurosci. 5, 1688–1703 (1985)
Uno, Y., Kawato, M., Suzuki, R.: Formation and control of optimal trajectory in human multipoint arm movement. Biol. Cybern. 61, 89–101 (1989)
Richardson, M.J.E., Flash, T.: Comparing smooth arm movements with the two-thirds power law and the related segmented-control hypothesis. J. Neurosci. 22, 8201–8211 (2002)
Wang, J., Sainburg, R.L.: The dominant and nondominant arms are specialized for stabilizing different features of task performance. Exp. Brain Res. 178, 565–570 (2007)
Ben-Itzhak, S., Karniel, A.: Minimum acceleration criterion with constraints implies bang-bang control as an underlying principle for optimal trajectories of arm reaching movements. Neural Comput. 20, 779–812 (2008)
Tsuji, T., Miki, Y., Ito, K.: Hand force during constrained arm movements and virtual trajectory hypothesis. SICE 28, 366–373 (1992)
Ota, K., Svinin, M.M., Luo, Z., Hosoe, S., Laboissière, R.: Optimal trajectory formation of constrained human arm reaching movements. Biol. Cybern. 91, 23–36 (2004)
Ota, K., Svinin, M.M., Luo, Z., Hosoe, S.: Optimal trajectory formation of human reaching movement in crank rotation task. IEICE D-II 87, 1707–1717 (2004)
Flanagan, J.R., Rao, A.K.: Trajectory adaptation to a nonlinear visuomotor transformation: evidence of motion planning in visually perceived space. J. Neurophysiol. 74, 2174–2178 (1995)
Fitts, P.M.: The information capacity of the human motor system in controlling the amplitude of movement. J. Exp. Psychol. 47, 381–391 (1954)
Bagesteiro, L.B., Sainburg, R.L.: Nondominant arm advantages in load compensation during rapid elbow joint movements. J. Neurophysiol. 90, 1503–1513 (2003)
Oyama, T., Sako, A.: Difference in bi-articular muscle during postural fixation between dominant and non-dominant arms. In: IIAI-AAI 2015, p. 187 (2015)
Yadav, V., Sainburg, R.L.: Handedness can be explained by a serial hybrid control scheme. Neurosci. 278, 385–396 (2014)
Karniel, A.: The minimum transition hypothesis for intermittent hierarchical motor control. Front. Comput. Neurosci. 7, 12 (2013)
Acknowledgments
This work was supported by JSPS KAKENHI Grant Number 15K21301.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 The Editor(s) (if applicable) and The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Oyama, T., Ito, T. (2020). Motor Control of Hand Force for Visual Indicator Without Hand Displacement. In: Di Bucchianico, G., Shin, C., Shim, S., Fukuda, S., Montagna, G., Carvalho, C. (eds) Advances in Industrial Design. AHFE 2020. Advances in Intelligent Systems and Computing, vol 1202. Springer, Cham. https://doi.org/10.1007/978-3-030-51194-4_117
Download citation
DOI: https://doi.org/10.1007/978-3-030-51194-4_117
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-51193-7
Online ISBN: 978-3-030-51194-4
eBook Packages: EngineeringEngineering (R0)