
Abstract
In this paper, the authors describe a Python customized code based on Agisoft MetaShape processing engine that permits the automatic solution of a complete photogrammetric process from acquisition of the image block by Unmanned Aerial Vehicle (UAV) to final results: Dense Digital Surface Model (DDSM), Digital Terrain Model (DTM) and orthophoto.
Inspired by the old approach on analytical stereo-plotter, the proposed solution is based on a partition of the aerial block in a series of strips that can be transmitted by drones to the processing units during the flight to obtain a “quasi-real-time” solution in a just few minutes at the end of the flight.
The Python code can automatically add images from remote folders creating new Metashape Chunks at the end of each strip; align images of each strip in few seconds using the approximate external parameters of images acquired by drone navigation sensors; recognize coded (and not) markers (GCPs) and make a bundle block solution of each strip; align different chunks in a unique photogrammetric block; solve the final photogrammetric block using camera pose optimization of Metashape with an automatic selection of CPs from the recognized markers; compile and show a report that permits the resulting diagnostic by a skilled user.
The proposed solution has been applied to a precision agriculture environment for automatically surveying a vineyard and recognize the rows and the ground areas for automatic path planning purposes.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
References
Aicardi, I., Chiabrando, F., Lingua, A.M., Noardo, F.: 2018: recent trends in cultural heritage 3D survey: the photogrammetric computer vision approach. J. Cult. Herit. 32, 257–266 (2018)
Angeli, S., Lingua, A.M., Maschio P., Piantelli L.: Dense 3D Model Generation of a Dam Surface Using UAV for Visual Inspection Conference on Robotics RAAD 2018. Mechanisms and Machine Science, vol. 67, 29 September 2018. Springer, Cham. https://doi.org/10.1007/978-3-030-00232-9_1
Barrientos, A., et al.: 2011: aerial remote sensing in agriculture: a practical approach to area coverage and path planning for fleets of mini aerial robots. J. Field Robot. 28(5), 667–689 (2011). https://doi.org/10.1002/rob.20403
Chiabrando, F., Giulio Tonolo, F., Lingua, A.: UAV direct georeferencing approach in an emergency mapping context. The 2016 central Italy earthquake case study. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 42, 2, 247–253 (2019). ISSN 1682-1750. Elettronico
Cina, A., Dabove, P., Manzino, A.M., Piras, M.: Network real time kinematic (NRTK) positioning description, architectures and performances. In: Satellite Positioning-Methods, Models and Applications. InTech (2015)
Colucci, E., Noardo, F., Matrone, F., Spanò, A., Lingua, A.M.: High-level-of-detail semantic 3D GIS for risk and damage representation of architectural heritage. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 42, 4, 177–183 (2018). ISSN 1682-1750. Stampa
Grilli, E., Menna, F., Remondino, F.: 2015: a review of point clouds segmentation and classification algorithms. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 42, 339 (2017)
Kanayama, Y., Hartman, B.I.: Smooth local path planning for autonomous vehicles. In: Proceedings of the IEEE International Conference on Robotics and Automation, vol. 3, pp. 1265–1270. IEEE (1989)
Lingua, A.M., Noardo, F., Spanò, A.T., Sanna, S., Matrone, F.: 3D model generation using oblique images acquired by UAV. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 42, 4/W2, 107–115 (2017). ISSN 1682-1750
Moon, S., Shim, D.H.-C.: Study on path planning algorithms for unmanned agricultural helicopters in complex environment. Int. J. Aeronaut. Space Sci. 10(2), 1–11 (2009)
Nelson, W.: Continuous-curvature paths for autonomous vehicles. In: Proceedings of the IEEE International Conference on Robotics and Automation, vol. 3, pp. 1260–1264. IEEE (1989)
Srinivasan, A.: Handbook of Precision Agriculture: Principles and Applications. CRC Press, Danvers (2006)
Zoto, J., Musci, M.A., Khaliq, A., Chiaberge, M., Aicardi, I.: Automatic path planning for unmanned ground vehicle using UAV imagery. In: Berns, K., Görges, D. (eds.) RAAD 2019. AISC, vol. 980, pp. 223–230. Springer, Cham (2020). https://doi.org/10.1007/978-3-030-19648-6_26
Acknowledgements
The study was carried out within the activities of the PoliTO Interdepartmental Centre for Service Robotics (PIC4SeR) and thanks to the concession of the “Azienda Agricola Ciabot” farm as regards the possibility of operating in the case study area.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendix: Python Source Code
Appendix: Python Source Code
-
a)
New chunk creation, images alignment and marker detection

-
b)
Dense cloud generation

-
c)
3D model creation

-
d)
DDSM and DTM generation (including cloud classification)

-
e)
Orthophoto production

-
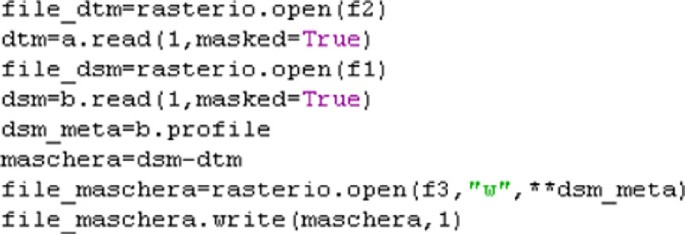
f)
Binary map production






Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Aicardi, I., Angeli, S., Milazzo, R., Lingua, A.M., Musci, M.A. (2020). A Python Customization of Metashape for Quasi Real-Time Photogrammetry in Precision Agriculture Application. In: Parente, C., Troisi, S., Vettore, A. (eds) R3 in Geomatics: Research, Results and Review. R3GEO 2019. Communications in Computer and Information Science, vol 1246. Springer, Cham. https://doi.org/10.1007/978-3-030-62800-0_18
Download citation
DOI: https://doi.org/10.1007/978-3-030-62800-0_18
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-62799-7
Online ISBN: 978-3-030-62800-0
eBook Packages: Computer ScienceComputer Science (R0)