
Abstract
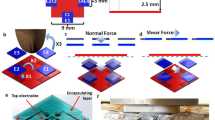
In this extended abstract, we present a soft stretchable multi-modal capacitive skin sensor that can be used for exteroception and proprioception in soft surgical manipulators. A soft skin prototype was made using Ecoflex, embedding three conductive carbon grease terminal layers. This soft skin is capable of measuring stretch and touch simultaneously. The soft skin measures uniaxial stretches from 1 to 1.2475 within an error range of 2.6% and can also quantify as well as localize local indentation. An algorithm is developed that decouples local change, i.e., due to indentation, from global strain, due to stretch. An experimental study was conducted; results are presented.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Fraś, J., Czarnowski, J., Maciaś, M., Główka, J.: Static modeling of multisection soft continuum manipulator for stiff-flop project. In: Szewczyk, R., Zieliński, C., Kaliczyńska, M. (eds.) Recent Advances in Automation, Robotics and Measuring Techniques. AISC, vol. 267, pp. 365–375. Springer, Cham (2014). https://doi.org/10.1007/978-3-319-05353-0_35
Cianchetti, M., et al.: Soft robotics technologies to address shortcomings in today’s minimally invasive surgery: the stiff-flop approach. Soft Robot. (2014). https://doi.org/10.1089/soro.2014.0001
Larson, C., et al.: Highly stretchable electroluminescent skin for optical signaling and tactile sensing. Science 80 (2016). https://doi.org/10.1126/science.aac5082
Kim, S.Y., Park, S., Park, H.W., Park, D.H., Jeong, Y., Kim, D.H.: Highly sensitive and multimodal all-carbon skin sensors capable of simultaneously detecting tactile and biological stimuli. Adv. Mater. (2015). https://doi.org/10.1002/adma.201501408
Park, J., et al.: Giant tunneling piezoresistance of composite elastomers with interlocked microdome arrays for ultrasensitive and multimodal electronic skins. ACS Nano (2014). https://doi.org/10.1021/nn500441k
Wang, T., et al.: A self-healable, highly stretchable, and solution processable conductive polymer composite for ultrasensitive strain and pressure sensing. Adv. Funct. Mater. (2018). https://doi.org/10.1002/adfm.201705551
Ho, D.H., Sun, Q., Kim, S.Y., Han, J.T., Kim, D.H., Cho, J.H.: Stretchable and multimodal all graphene electronic skin. Adv. Mater. (2016). https://doi.org/10.1002/adma.201505739
Hua, Q., et al.: Skin-inspired highly stretchable and conformable matrix networks for multifunctional sensing. Nat. Commun. (2018). https://doi.org/10.1038/s41467-017-02685-9
Maiolino, P., Maggiali, M., Cannata, G., Metta, G., Natale, L.: A flexible and robust large scale capacitive tactile system for robots. IEEE Sens. J. (2013). https://doi.org/10.1109/JSEN.2013.2258149
Wall, V., Zoller, G., Brock, O.: A method for sensorizing soft actuators and its application to the RBO hand 2. In: Proceedings - IEEE International Conference on Robotics and Automation (2017). https://doi.org/10.1109/icra.2017.7989577
Totaro, M., Mondini, A., Bellacicca, A., Milani, P., Beccai, L.: Integrated simultaneous detection of tactile and bending cues for soft robotics. Soft Robot. (2017). https://doi.org/10.1089/soro.2016.0049
Dawood, A.B., Godaba, H., Althoefer, K.: Modelling of a soft sensor for exteroception and proprioception in a pneumatically actuated soft robot. In: Althoefer, K., Konstantinova, J., Zhang, K. (eds.) TAROS 2019. LNCS (LNAI), vol. 11650, pp. 99–110. Springer, Cham (2019). https://doi.org/10.1007/978-3-030-25332-5_9
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Dawood, A.B., Godaba, H., Althoefer, K. (2020). Silicone Based Capacitive E-Skin Sensor for Soft Surgical Robots. In: Mohammad, A., Dong, X., Russo, M. (eds) Towards Autonomous Robotic Systems. TAROS 2020. Lecture Notes in Computer Science(), vol 12228. Springer, Cham. https://doi.org/10.1007/978-3-030-63486-5_8
Download citation
DOI: https://doi.org/10.1007/978-3-030-63486-5_8
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-63485-8
Online ISBN: 978-3-030-63486-5
eBook Packages: Computer ScienceComputer Science (R0)