
Abstract
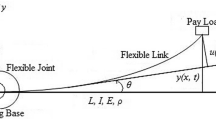
In this paper, a novel passivity-based controller for flexible links robotic mechanisms is proposed. Something that is a substantial contribution to the field is that the dynamic model of two degrees of robotic freedom mechanism is proposed considering, that in this case, a suitable shaping function is implemented in FEM derivations. Along with the Euler-Lagrange method, the two-links robot’s dynamic model is obtained considering the transformation matrices’ with appropriate derivations to obtain the robot’s kinematic angular velocity vectors to get the desired dynamic model. It is essential to consider that the joints’ rotating angles are calculated appropriately by obtaining the node vectors of the FEM derivations when a flexion occurs on each link of the robotic manipulator and obtaining the node vectors about the original coordinate axis. A passivity-based controller is then designed to drive the joint angles and joint velocities to the equilibrium in finite time. Thus, due to the energy considerations of the proposed passivity-based controller, the system’s energy dissipation is ensured.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Ajeil, F.H., Ibraheem, I.K., Azar, A.T., Humaidi, A.J.: Autonomous navigation and obstacle avoidance of an omnidirectional mobile robot using swarm optimization and sensors deployment. Int. J. Adv. Robot. Syst. 17(3), 1–15 (2020)
Azar, A.T., Sayed, A.S., Shahin, A.S., Elkholy, H.A., Ammar, H.H.: PID controller for 2-DOFs twin rotor MIMO system tuned with particle swarm optimization. In: Proceedings of the International Conference on Advanced Intelligent Systems and Informatics 2019, Volume 1058 of Advances in Intelligent Systems and Computing, pp. 229–242. Springer, Cham (2020a)
Azar, A.T., Serrano, F.E.: Passivity based decoupling of Lagrangian systems. In: Proceedings of the International Conference on Advanced Intelligent Systems and Informatics 2017, Volume 639 of Advances in Intelligent Systems and Computing, pp. 36–46. Springer, Cham (2018)
Azar, A.T., Serrano, F.E., Hameed, I.A., Kamal, N.A., Vaidyanathan, S.: Robust H-infinity decentralized control for industrial cooperative robots. In: Proceedings of the International Conference on Advanced Intelligent Systems and Informatics 2019, Volume 1058 of Advances in Intelligent Systems and Computing, pp. 254–265. Springer, Cham (2020b)
Beiranvand, A., Kalhor, A., Tale Masouleh, M.: Modeling, identification and minimum length integral sliding mode control of a 3-DOF cartesian parallel robot by considering virtual flexible links. Mech. Mach. Theory 157, 104183 (2021)
Cammarata, A.: Full and reduced models for the elastodynamics of fully flexible parallel robots. Mech. Mach. Theory 151, 103895 (2020)
Cardona, M., García Cena, C.E., Serrano, F., Saltaren, R.: ALICE: conceptual development of a lower limb exoskeleton robot driven by an on-board musculoskeletal simulator. Sensors 20(3), 789 (2020a)
Cardona, M., Serrano, F., Martín, J., Rausell, E., Saltaren, R., García-Cena, C.: El exoesqueleto de rehabilitación de la marcha alice: análisis dinámico y evaluación del sistema de control utilizando cuaternios de hamilton. Revista Iberoamericana de Automática e Informática industrial 18(1), 48–57 (2020b)
Cheng, J., Shu, C.-W., Song, P.: High order conservative Lagrangian schemes for one-dimensional radiation hydrodynamics equations in the equilibrium-diffusion limit. J. Comput. Phys. 421, 109724 (2020)
Fang, T., Jiao, S., Fu, D., Su, L.: Passivity-based synchronization for Markov switched neural networks with time delays and the inertial term. Appl. Math. Comput. 394, 125786 (2021)
Fouques, S., Pakozdi, C.: A mixed Eulerian-Lagrangian high-order spectral method for the propagation of ocean surface waves over a flat bottom. J. Comput. Phys.: X 8, 100071 (2020)
Gaburro, E., Boscheri, W., Chiocchetti, S., Klingenberg, C., Springel, V., Dumbser, M.: High order direct arbitrary-Lagrangian-Eulerian schemes on moving Voronoi meshes with topology changes. J. Comput. Phys. 407, 109167 (2020)
Gil-González, W., Montoya, O.D., Garces, A.: Standard passivity-based control for multi-hydro-turbine governing systems with surge tank. Appl. Math. Model. 79, 1–17 (2020)
Humaidi, A.J., Ibraheem, I.K., Azar, A.T., Sadiq, M.E.: A new adaptive synergetic control design for single link robot arm actuated by pneumatic muscles. Entropy 22(7), 723 (2020)
Ibraheem, G.A.R., Azar, A.T., Ibraheem, I.K., Humaidi, A.J.: A novel design of a neural network-based fractional PID controller for mobile robots using hybridized fruit fly and particle swarm optimization. Complexity 2020(2020), 1–18 (2020)
Jung, J., Yoon, K., Lee, P.-S.: Deep learned finite elements. Comput. Methods Appl. Mech. Eng. 372, 113401 (2020)
Khoei, A., Anahid, M., Shahim, K.: An extended arbitrary Lagrangian-Eulerian finite element method for large deformation of solid mechanics. Finite Elements Anal. Des. 44(6), 401–416 (2008)
Kong, S., Bressel, M., Hilairet, M., Roche, R.: Advanced passivity-based, aging-tolerant control for a fuel cell/super-capacitor hybrid system. Control Eng. Pract. 105, 104636 (2020)
Lambert, N.: (2,0) Lagrangian structures. Phys. Lett. B 798, 134948 (2019)
Lee, C., Kim, S., Lee, P.-S.: The strain-smoothed 4-node quadrilateral finite element. Comput. Methods Appl. Mech. Eng. 373, 113481 (2021)
Morlock, M., Meyer, N., Pick, M.-A., Seifried, R.: Real-time trajectory tracking control of a parallel robot with flexible links. Mech. Mach. Theory 158, 104220 (2021)
My, C.A., Bien, D.X., Le, C.H., Packianather, M.: An efficient finite element formulation of dynamics for a flexible robot with different type of joints. Mech. Mach. Theory 134, 267–288 (2019)
Ruderman, M., Bertram, T., Iwasaki, M.: Modeling, observation, and control of hysteresis torsion in elastic robot joints. Mechatronics 24(5), 407–415 (2014)
Russer, J.A., Russer, P.: Lagrangian and Hamiltonian formulations for classical and quantum circuits. IFAC Proc. Vol. 45(2), 439–444 (2012)
Schreck, M.: Classical Lagrangians for the nonminimal standard-model extension at higher orders in Lorentz violation. Phys. Lett. B 793, 70–77 (2019)
Spong, M.W., Hutchinson, S., Vidyasagar, M.: Robot Modeling and Control. Wiley, Hoboken (2006)
Yamashita, S., Hatanaka, T., Yamauchi, J., Fujita, M.: Passivity-based generalization of primal-dual dynamics for non-strictly convex cost functions. Automatica 112, 108712 (2020)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Azar, A.T. et al. (2021). Finite Element Euler-Lagrange Dynamic Modeling and Passivity Based Control of Flexible Link Robot. In: Hassanien, A.E., et al. Proceedings of the International Conference on Artificial Intelligence and Computer Vision (AICV2021). AICV 2021. Advances in Intelligent Systems and Computing, vol 1377. Springer, Cham. https://doi.org/10.1007/978-3-030-76346-6_41
Download citation
DOI: https://doi.org/10.1007/978-3-030-76346-6_41
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-76345-9
Online ISBN: 978-3-030-76346-6
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)