
Abstract
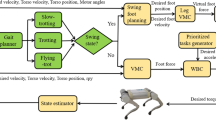
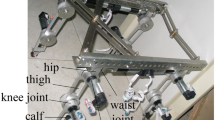
This paper introduces a quadruped robot with a wide range of motion for joints, which provides a basis for the robot to change its configuration. Two basic configurations are defined for the robot, including mammal-like configuration, which the front and hind knees point to each other and one reptile-like configuration with sprawling legs. Different control modes are configured to make the robot can switch between different configuration, which gives it ability to face different environments. For the mammal-like configuration, a parametric trotting gait is designed to traverse structural terrain level ground. For the reptile-like configuration, a turtle gait is designed to achieve robust locomotion on uneven terrain. Simulations and experiments show that the robot is capable to move on multiple terrains, including doorsills, slopes, stones. This paper demonstrates that through the design of leg foot configuration, some difficult tasks can be achieved in a rather simple way without using complicated control algorithms, which shows the potential of multi configuration in the application of quadruped robot.
This work was supported by the National Natural Science Foundation of China (62003190), the China Postdoctoral Science Foundation (2019M662359), the fellowship of China Postdoctoral Science Foundation (2020T130369), and the Natural Science Foundation of Shandong Province (ZR201911040226).
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Rong, X., Li, Y., Ruan, J., et al.: Design and simulation for a hydraulic actuated quadruped robot. J. Mech. Sci. Technol. 26, 1171–1177 (2012)
Hutter, M., et al.: ANYmal - toward legged robots for harsh environments. Adv. Robot. 31(17) (2017). https://doi.org/10.1080/01691864.2017.1378591
Raibert, M., Blankespoor, K., Nelson, G., Playter, R.: BigDog, the rough-terrain quadruped robot. In: Proceedings of the 17th World Congress, pp. 10823–10825 (2008)
Semini, C., Tsagarakis, N.G., Guglielmino, E., Focchi, M., Cannella, F., Caldwell, D.G.: Design of HyQ - a hydraulically and electrically actuated quadruped robot. In: Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, vol. 225, no. 6, pp. 831–849 (2011)
Wang, H., Zheng, Y.F., Jun, Y., Oh, P.: DRC-hubo walking on rough terrains. In: IEEE International Conference on Technologies for Practical Robot Applications (TePRA) (2014)
Saranli, U., Buehler, M., Koditschek, D.E.: RHex: a simple and highly mobile hexapod robot. Int. J. Robot. Res. 20(7), 616–631 (2001)
Seok, S., Wang, A., Otten, D., Lang, J., Kim, S.: Design principles for highly efficient quadrupeds and implementation on the MIT Cheetah robot. In: IEEE International Conference on Robotics and Automation (ICRA), pp. 3307–3312 (2013)
Hutter, M., Gehring, C., Bloesch, M., Hoepflinger, M.H., Remy, C.D., Siegwart, R.: StarlETH: a compliant quadrupedal robot for fast, efficient, and versatile locomotion. In: International Conference on Climbing and Walking Robots (CLAWAR), pp. 483–490 (2012)
Tarokh, M., Lee, M.: Kinematics Modeling of Multi-legged Robots walking on Rough Terrain. In: 2008 Second International Conference on Future Generation Communication and Networking Symposia, Sanya, pp. 12–16 (2008)
Kitano, S., Hirose, S., Endo, G., Fukushima, E.F.: Development of lightweight sprawling-type quadruped robot TITAN-XIII and its dynamic walking. In: 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, pp. 6025–6030 (2013)
Sakakibara, Y., Kan, K., Hosoda, Y., Hattori, M., Fujie, M.: Foot trajectory for a quadruped walking machine. In: Proceedings of IEEE International Workshop on Intelligent Robots and Systems, Towards a New Frontier of Applications, IROS 1990, pp. 315–322. IEEE (1990)
Rong, X.W., Li, Y.B., Ruan, J.H., Song, H.J.: Kinematics analysis and simulation of a quadruped robot. Appl. Mech. Mater. 26, 517–522 (2010)
Farley, C.T., Taylor, C.R.: A mechanical trigger for the trot-gallop transition in horses. Science 253(5017), 306–308 (1991)
Lu, G., et al.: A novel multi-configuration quadruped robot with redundant DOFs and its application scenario analysis. In: 2021 International Conference on Computer, Control and Robotics (ICCCR) (2021)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Switzerland AG
About this paper

Cite this paper
Sun, Z., Zhu, Z., Zhang, G., Li, Y., Rong, X. (2021). Design and Control of a Quadruped Robot with Changeable Configuration. In: Liu, XJ., Nie, Z., Yu, J., Xie, F., Song, R. (eds) Intelligent Robotics and Applications. ICIRA 2021. Lecture Notes in Computer Science(), vol 13015. Springer, Cham. https://doi.org/10.1007/978-3-030-89134-3_58
Download citation
DOI: https://doi.org/10.1007/978-3-030-89134-3_58
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-89133-6
Online ISBN: 978-3-030-89134-3
eBook Packages: Computer ScienceComputer Science (R0)