
Abstract
Automation is ubiquitous and is finding its way into more and highly specialized applications - including cryo-conservation. However, manual handling of biological or toxic samples is still the norm in research and commercial storage facilities. In biobanks, samples are stored, retrieved or moved by hand wearing rigid, protective clothing due to the significant risk of injury to personnel from cold burns. In addition, sample integrity is compromised by temperature changes or contamination.
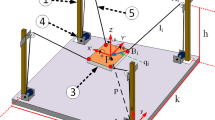
In this paper, we present an approach for the automation of handling processes in cryobanks for cryopreservation at temperatures below −130 ℃. The automation system is based on a parallel robot, as its structure allows the positioning of the drives outside the cooled workspace. The robot’s joints and manipulators are located inside the biobank, cooled with liquid nitrogen. The passive joints of the robot are implemented as Cardan joints, which are composed of multiple flexure hinges. In the following, we describe the design of the kinematic chains of the parallel robot’s structure. The elaboration of these is based on the results of FE-modeling of individual components under cryogenic conditions. We then subject the overall structure to static mechanical simulations, both in its initial position and under deflection of the actuator and compare the occurring deviations with the calculations based on the inverse solution.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Alikani, M., Parmegiani, L.: Human reproductive cell cryopreservation, storage, handling, and transport: risks and risk management. Semin. Reprod. Med. 36, 265–272 (2018). https://doi.org/10.1055/s-0038-1676849
Kaindl, J., Meiser, I., Majer, J., et al.: Zooming in on cryopreservation of hiPSCs and neural derivatives: a dual-center study using adherent vitrification. Stem Cells Transl. Med. 8, 247–259 (2019). https://doi.org/10.1002/sctm.18-0121
Yu, G., Wang, L., Wu, J., et al.: Stiffness modeling approach for a 3-DOF parallel manipulator with consideration of nonlinear joint stiffness. Mech. Mach. Theory 123, 137–152 (2018). https://doi.org/10.1016/j.mechmachtheory.2018.01.005
Yun, Y., Li, Y.: Design and analysis of a novel 6-DOF redundant actuated parallel robot with compliant hinges for high precision positioning. Nonlinear Dyn. 61, 829–845 (2010). https://doi.org/10.1007/s11071-010-9690-x
Chen, Y., Xie, F., Liu, X., et al.: Error modeling and sensitivity analysis of a parallel robot with SCARA (selective compliance assembly robot arm) motions. Chin. J. Mech. Eng. 27, 693–702 (2014). https://doi.org/10.3901/CJME.2014.0423.082
Kozuka, H., Arata, J., Ichikawa, S., et al.: Multi-DOF compliant-parallel mechanism for high precision machine in optical industry. J. Robot. Soc. Jpn. 32, 481–489 (2014)
Schappler, M., Jahn, P., Raatz, A., et al.: Combined Structural and Dimensional Synthesis of a Parallel Robot for Cryogenic Handling Tasks. In: Annals of Scientific Society for Assembly, Handling and Industrial Robotics 2021, vol. 125, pp. 65–77. Springer, Cham (2022)
Jahn, P., Ihmig, F., Raatz, A.: Design of a parallel robot with additively manufactured flexure hinges for a cryogenic work environment. Procedia CIRP 103, 280–285 (2021). https://doi.org/10.1016/j.procir.2021.10.045
Jahn, P., Raatz, A.: Numerical simulation and statistical analysis of a cascaded flexure hinge for use in a cryogenic working environment. In: Schüppstuhl, T., Tracht, K., Henrich, D. (eds.) Annals of Scientific Society for Assembly, Handling and Industrial Robotics, pp. 81–94. Springer, Heidelberg (2020). https://doi.org/10.1007/978-3-662-61755-7_8
Ansys Inc.: Adapt large deflection simulations confidently - nonlinear adaptivity. White Paper, Canonsburg (2021)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Jahn, P., Hentschel, J., Raatz, A. (2022). Design and Analysis of a Compliant Parallel Robot with Cardan Joints for a Cryogenic Working Environment. In: Altuzarra, O., Kecskeméthy, A. (eds) Advances in Robot Kinematics 2022. ARK 2022. Springer Proceedings in Advanced Robotics, vol 24. Springer, Cham. https://doi.org/10.1007/978-3-031-08140-8_24
Download citation
DOI: https://doi.org/10.1007/978-3-031-08140-8_24
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-08139-2
Online ISBN: 978-3-031-08140-8
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)