
Abstract
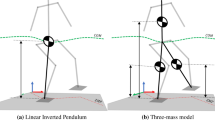
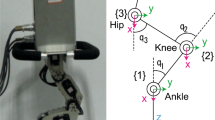
To achieve agile running of a biped robot, dynamic stability, joint coordination, and real-time ability are required. In this paper, a task-space-based controller framework is constructed with a reduced-order 3D-SLIP model. On the top layer, a 3D-SLIP model based planner is employed for center-of-mass trajectory planning. The planner built with optimization for table divided apex state, and a neural network is used to fit the optimized table for real-time planning. On the bottom layer, a task-space-based controller with full-body dynamics is utilized, which solves the quadratic programming for the optimized joint torque in real-time. A 12-DOF biped robot model with a point-foot is used for simulation verification. The simulation result show that stable running and single-cycle apex state change running can achieved with the framework.
This work was supported in part by the National Natural Science Foundation of China under Grant 52175011.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Kuo, A.D., Donelan, J.M., Ruina, A.: Energetic consequences of walking like an inverted pendulum: step-to-step transitions. Exercise Sport Sci. Rev. 33(2), 88–97 (2005)
Kajita, S., Tani, K.: Study of dynamic biped locomotion on rugged terrain-derivation and application of the linear inverted pendulum mode. In: Proceedings. 1991 IEEE International Conference on Robotics and Automation, pp. 1405–1406. IEEE Computer Society (1991)
Kajita, S., et al.: Biped walking stabilization based on linear inverted pendulum tracking. In: 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 4489–4496. IEEE (2010)
Pratt, J., Carff, J., Drakunov, S., Goswami, A.: Capture point: a step toward humanoid push recovery. In: 2006 6th IEEE-RAS International Conference on Humanoid Robots, pp. 200–207. IEEE (2006)
Krause, M., Englsberger, J., Wieber, P.-B., Ott, C.: Stabilization of the capture point dynamics for bipedal walking based on model predictive control. IFAC Proc. Vol. 45(22), 165–171 (2012)
Morisawa, M., Kajita, S., Kanehiro, F., Kaneko, K., Miura, K., Yokoi, K.: Balance control based on capture point error compensation for biped walking on uneven terrain. In: 2012 12th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2012), pp. 734–740. IEEE (2012)
Raibert, M.H., Benjamin Brown Jr, H., Chepponis, M., Koechling, J., Hodgins, J.K.: Dynamically stable legged locomotion. Technical report, Massachusetts Inst of Tech Cambridge Artificial Intelligence Lab (1989)
Geyer, H., Seyfarth, A., Blickhan, R.: Spring-mass running: simple approximate solution and application to gait stability. J. Theor. Biol. 232(3), 315–328 (2005)
Albert, W., Geyer, H.: The 3-d spring-mass model reveals a time-based deadbeat control for highly robust running and steering in uncertain environments. IEEE Trans. Rob. 29(5), 1114–1124 (2013)
Xin, S., Delhaisse, B., You, Y., Zhou, C., Shahbazi, M., Tsagarakis, N.: Neural-network-controlled spring mass template for humanoid running. In: 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1725–1731. IEEE (2018)
Wensing, P.M., Orin, D.E.: Generation of dynamic humanoid behaviors through task-space control with conic optimization. In: 2013 IEEE International Conference on Robotics and Automation, pp. 3103–3109. IEEE (2013)
Wiedebach, G., et al.: Walking on partial footholds including line contacts with the humanoid robot atlas. In: 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), pages 1312–1319. IEEE (2016)
Baerlocher, P., Boulic, R.: Task-priority formulations for the kinematic control of highly redundant articulated structures. In: Proceedings of the 1998 IEEE/RSJ International Conference on Intelligent Robots and Systems. Innovations in Theory, Practice and Applications (Cat. No. 98CH36190), vol. 1, pp. 323–329. IEEE, 1998
Kajita, S., e al.: Resolved momentum control: Humanoid motion planning based on the linear and angular momentum. In Proceedings 2003 ieee/rsj International Conference on Intelligent Robots and Systems (IROS 2003) (cat. no. 03ch37453), vol. 2, pp. 1644–1650. IEEE (2003)
Kuindersma, S., Permenter, F., Tedrake, R.: An efficiently solvable quadratic program for stabilizing dynamic locomotion. In: 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 2589–2594. IEEE (2014)
Koolen, T., Deits, R.: Julia for robotics: simulation and real-time control in a high-level programming language. In: 2019 International Conference on Robotics and Automation (ICRA), pp. 604–611. IEEE (2019)
Featherstone, R.: Rigid body dynamics algorithms. Springer (2014)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Wang, S., Li, Z., Gao, H., Shan, K., Li, J., Yu, H. (2022). Agile Running Control for Bipedal Robot Based on 3D-SLIP Model Regulation in Task-Space. In: Liu, H., et al. Intelligent Robotics and Applications. ICIRA 2022. Lecture Notes in Computer Science(), vol 13455. Springer, Cham. https://doi.org/10.1007/978-3-031-13844-7_48
Download citation
DOI: https://doi.org/10.1007/978-3-031-13844-7_48
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-13843-0
Online ISBN: 978-3-031-13844-7
eBook Packages: Computer ScienceComputer Science (R0)