
Abstract
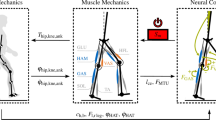
For the impulsive ankle push-off (APO) observed in human walking two muscle-tendon-units (MTUs) spanning the ankle joint play an important role: Gastrocnemius (GAS) and Soleus (SOL). GAS and SOL load the Achilles tendon to store elastic energy during stance followed by a rapid energy release during APO. We use a neuromuscular simulation (NMS) and a bipedal robot to investigate the role of GAS and SOL on the APO. We optimize the simulation for a robust gait and then sequentially replace the MTUs of (1) GAS, (2) SOL and (3) GAS and SOL by linear springs. To validate the simulation, we implement NMS-3 on a bipedal robot. Simulation and robot walk steady for all trials showing an impulsive APO. Our results imply that the elastic MTU properties shape the impulsive APO. For prosthesis or robot design that is, no complex ankle actuation is needed to obtain an impulsive APO, if more mechanical intelligence is incorporated in the design.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Sygulla, F., Rixen, D.: A force-control scheme for biped robots to walk over uneven terrain including partial footholds. Int. J. Adv. Rob. Syst. 17, 172988141989747 (2020). https://doi.org/10.1177/1729881419897472
Lechler, K., et al.: Motorized biomechatronic upper and lower limb prostheses-clinically relevant outcomes. PM &R 10, S207–S219 (2018). https://doi.org/10.1016/j.pmrj.2018.06.015
Cardona, M., Solanki, V.K., García Cena, C.E.: Exoskeleton Robots for Rehabilitation and Healthcare Devices. Springer, Singapore (2020). https://doi.org/10.1007/978-981-15-4732-4
Perry, J., Burnfield, J.M., Cabico, L.M.: Gait Analysis: Normal and Pathological Function. SLACK (2010). ISBN 9781556427664
Meinders, M., Gitter, A., Czerniecki, J.M.: The role of ankle plantar flexor muscle work during walking. Scand. J. Rehabil. Med. 30, 39–46 (1998). https://doi.org/10.1080/003655098444309
Lipfert, S.W., Günther, M., Renjewski, D., Seyfarth, A.: Impulsive ankle push-off powers leg swing in human walking. J. Exp. Biol. 217, 1218–1228 (2014). https://doi.org/10.1242/jeb.097345
McNeill, A.R., Bennet-Clark, H.C.: Storage of elastic strain energy in muscle and other tissues. Nature 265, 114–117 (1977). https://doi.org/10.1038/265114a0
Alexander, R.M.: Energy-saving mechanisms in walking and running. J. Exp. Biol. 160, 55–69 (1991). https://doi.org/10.1242/jeb.160.1.55
Alexander, M.R.: A model of bipedal locomotion on compliant legs (1992)
Hof, A.L., Geelen, B.A., van den Berg, J.: Calf muscle moment, work and efficiency in level walking; role of series elasticity. J. Biomech. 16, 523–537 (1983). https://doi.org/10.1016/0021-9290(83)90067-2
Wilson, A.M., Watson, J.C., Lichtwark, G.A.: A catapult action for rapid limb protraction. Nature 421, 35–36 (2003). https://doi.org/10.1038/421035a
Gronenberg, W.: Fast actions in small animals: springs and click mechanisms. J. Comparat. Physiol. A 178, 727–734 (1996). https://doi.org/10.1007/bf00225821
Bennet-Clark, H.C.: The energetics of the jump of the locust schistocerca gregaria. J. Exp. Biol. 63, 53–83 (1975). https://doi.org/10.1242/jeb.63.1.53
Nishikawa, K.C.: Neuromuscular control of prey capture in frogs. Philos. Trans. Roy. Soc. London Ser. B Biol. Sci. 354, 941–954 (1999). https://doi.org/10.1098/rstb.1999.0445
Cronin, N.J., Prilutsky, B.I., Lichtwark, G.A., Maas, H.: Does ankle joint power reflect type of muscle action of soleus and gastrocnemius during walking in cats and humans? J. Biomech. 46, 1383–1386 (2013). https://doi.org/10.1016/j.jbiomech.2013.02.023
Ishikawa, M., Komi, P.V., Grey, M.J., Lepola, V., Bruggemann, G.-P.: Muscletendon interaction and elastic energy usage in human walking. J. Appl. Physiol. (Bethesda Md.: 1985) 99, 603–608 (2005). https://doi.org/10.1152/japplphysiol.00189.2005
Geyer, H., Herr, H.: A muscle-reflex model that encodes principles of legged mechanics produces human walking dynamics and muscle activities. IEEE Trans. Neural Syst. Rehabil. Eng.: Publ. IEEE Eng. Med. Biol. Soc. 18, 263–273 (2010). https://doi.org/10.1109/TNSRE.2010.2047592
Geyer, H., Seyfarth, A.: Neuromuscular control models of human locomotion. In: Goswami, A., Vadakkepat, P. (eds.) Humanoid Robotics: A Reference, pp. 979–1007. Springer, Dordrecht (2019). https://doi.org/10.1007/978-94-007-6046-2_45. ISBN 978-94-007-6046-2
Veerkamp, K., et al.: Evaluating cost function criteria in predicting healthy gait. J. Biomech. 123, 110530 (2021). https://doi.org/10.1016/j.jbiomech.2021.110530
Falisse, A., et al.: Rapid predictive simulations with complex musculoskeletal models suggest that diverse healthy and pathological human gaits can emerge from similar control strategies. J. R. Soc. Interface 16, 20190402 (2019). https://doi.org/10.1098/rsif.2019.0402
Crowninshield, R.D., Brand, R.A.: A physiologically based criterion of muscle force prediction in locomotion. J. Biomech. 14, 793–801 (1981). https://doi.org/10.1016/0021-9290(81)90035-X
Umberger, B.R., Gerritsen, K.G.M., Martin, P.E.: A model of human muscle energy expenditure. Comput. Methods Biomech. Biomed. Eng. 6, 99–111 (2003). https://doi.org/10.1080/1025584031000091678
Kiss, B., et al.: Investigation on a bipedal robot: why do humans need both Soleus and Gastrocnemius muscles for ankle push-off during walking? 3 March 2022
Ijspeert, A.J.: Central pattern generators for locomotion control in animals and robots: a review. Neural Netw. 21, 642–653 (2008). https://doi.org/10.1016/j.neunet.2008.03.014
Lichtwark, G.A., Bougoulias, K., Wilson, A.M.: Muscle fascicle and series elastic element length changes along the length of the human gastrocnemius during walking and running. J. Biomech. 40, 157–164 (2007). https://doi.org/10.1016/j.jbiomech.2005.10.035
Umberger, B.R.: Stance and swing phase costs in human walking. J. R. Soc. Interface 7, 1329–1340 (2010). https://doi.org/10.1098/rsif.2010.0084
Zelik, K.E., Huang, T.-W.P., Adamczyk, P.G., Kuo, A.D.: The role of series ankle elasticity in bipedal walking. J. Theor. Biol. 346, 75–85 (2014). https://doi.org/10.1016/j.jtbi.2013.12.014
Sawicki, G.S., Lewis, C.L., Ferris, D.P.: It pays to have a spring in your step. Exerc. Sport Sci. Rev. 37, 130–138 (2009). https://doi.org/10.1097/JES.0b013e31819c2df6
Yamaguchi, G.T., Sawa, A.G.U., Moran, D.W., Fessler, M.J., Winters, J.M.: A survey of human musculotendon actuator parameters (1990)
Collins, S.H., Wiggin, M.B., Sawicki, G.S.: Reducing the energy cost of human walking using an unpowered exoskeleton. Nature 522, 212–215 (2015). https://doi.org/10.1038/nature14288
Schumacher, C., Sharba, M., Seyfarth, A., Rode, C.: Biarticular muscles in light of template models, experiments and robotics: a review. J. Roy. Soc. Interface 17, 20180413 (2020). https://doi.org/10.1098/rsif.2018.0413
Acknowledgements
The authors thank Emre Cemal Gonen and An Mo for their help with the robot data. The project is funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) - 449427815.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Buchmann, A., Kiss, B., Badri-Spröwitz, A., Renjewski, D. (2023). Power to the Springs: Passive Elements are Sufficient to Drive Push-Off in Human Walking. In: Cascalho, J.M., Tokhi, M.O., Silva, M.F., Mendes, A., Goher, K., Funk, M. (eds) Robotics in Natural Settings. CLAWAR 2022. Lecture Notes in Networks and Systems, vol 530. Springer, Cham. https://doi.org/10.1007/978-3-031-15226-9_5
Download citation
DOI: https://doi.org/10.1007/978-3-031-15226-9_5
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-15225-2
Online ISBN: 978-3-031-15226-9
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)