
Abstract
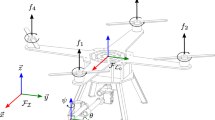
Control and stabilization of aerial manipulators is a challenging problem due to the effects of the relative movements of the arm and aerial platform on the dynamics. In many cases, conventional multirotor controllers and autopilots are based on the cascaded structure of underactuated mechanical systems, and consider these effects as perturbations. This control scheme, which controls the arm and the aerial platform as two separated systems, is known as decoupled control scheme. In practice, the success of this approach will depend on the design and movements of the arm. This paper presents the analysis of the control performance and stability of an aerial manipulator with a decoupled controller for different speeds of movement and inertia moments of the manipulator arm. The aerial manipulator consists of a hexarotor and a 2-DoF manipulator arm with variable length links. The arm was built in this way to change its inertia, so it may be representative of a widely class of arms used in aerial manipulation. The proposed aerial manipulator has been analysed in simulation tests for two representative tasks. For both cases, the stability limits of the system, represented as stability maps, are identified as a function of the inertial design and the typical velocities of the arm movements. These stability maps are validated through experiments. This analysis will be useful to guide the inertial design of the arm and to define the envelope of arm movements for safe operation.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Fumagalli, M., et al.: Developing an aerial manipulator prototype: physical interaction with the environment. IEEE Robot. Autom. Mag. 21(3), 41–50 (2014)
Chen, H., Quan, F., Fang, L., Zhang, S.: Aerial grasping with a lightweight manipulator based on multi-objective optimization and visual compensation. Sensors 19(19), 4253 (2019)
Sanchez-Cuevas, P.J., et al.: Fully-actuated aerial manipulator for infrastructure contact inspection: design, modeling, localization, and control. Sensors 20(17), 4708 (2020)
Suarez, A., Heredia, G., Ollero, A.: Design of an anthropomorphic, compliant, and lightweight dual arm for aerial manipulation. IEEE Access 6, 29 173–29 189 (2018)
Suarez, A., Sanchez-Cuevas, P., Fernandez, M., Perez, M., Heredia, G., Ollero, A.: Lightweight and compliant long reach aerial manipulator for inspection operations. In: 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 6746–6752 (2018)
Heredia, G., Cano, R., Jimenez-Cano, A., Ollero, A.: Modeling and design of multirotors with multi-joint arms. In: Ollero, A., Siciliano, B. (eds.) Aerial Robotic Manipulation. Springerr, Cham (2019). https://doi.org/10.1007/978-3-030-12945-3_2
Ollero, A., Tognon, M., Suarez, A., Lee, D., Franchi, A.: Past, present, and future of aerial robotic manipulators. IEEE Trans. Robot. 38, 626–645 (2021)
Ruggiero, F., Lippiello, V., Ollero, A.: Aerial manipulation: a literature review. IEEE Robot. Autom. Lett. 3(3), 1957–1964 (2018)
Cataldi, E., et al.: Impedance control of an aerial-manipulator: preliminary results. In: 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3848–3853 (2016)
Yang, H., Lee, D.: Dynamics and control of quadrotor with robotic manipulator. In: 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 5544–5549 (2014D)
Jimenez-Cano, A., Martin, J., Heredia, G., Ollero, A., Cano, R.: Control of an aerial robot with multi-link arm for assembly tasks. In: 2013 IEEE International Conference on Robotics and Automation, pp. 4916–4921 (2013)
Heredia, G., et al.: Control of a multirotor outdoor aerial manipulator. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (2014)
Ryll, M., Bicego, D., Franchi, A.: Modeling and control of FAST-Hex: a fully-actuated by synchronized-tilting hexarotor. In: 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1689–1694 (2016)
Liu, C., Lu, H., Chen, W.-H.: An explicit MPC for quadrotor trajectory tracking. In: 2015 34th Chinese Control Conference (CCC), pp. 4055–4060 (2015)
Zhang, W., et al.: Design of an aerial manipulator system applied to capture missions. In: 2021 International Conference on Unmanned Aircraft Systems (ICUAS), pp. 1063–1069 (2021)
Videos of the experiments. https://hdvirtual.us.es/discovirt/index.php/s/yLiw4dEPCynaRcc
Acknowledgment
This work has been supported by the ARTIC project, funded by the Spanish Ministerio de Economía, Industria, y Competitividad (RTI2018-102224-B-I00), and the AERIAL-CORE (H2020-2019-871479) and the AEROTRAIN Marie Skłodowska-Curie (MSCA-ITN-2020-953454) projects, funded by the European Commission.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
González-Morgado, A., Álvarez-Cía, C., Heredia, G., Ollero, A. (2023). Control and Stability of an Aerial Manipulator Depending on the Inertial Parameters. In: Tardioli, D., Matellán, V., Heredia, G., Silva, M.F., Marques, L. (eds) ROBOT2022: Fifth Iberian Robotics Conference. ROBOT 2022. Lecture Notes in Networks and Systems, vol 589. Springer, Cham. https://doi.org/10.1007/978-3-031-21065-5_8
Download citation
DOI: https://doi.org/10.1007/978-3-031-21065-5_8
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-21064-8
Online ISBN: 978-3-031-21065-5
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)