
Abstract
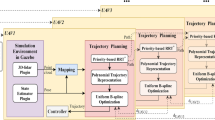
This paper proposes a decentralized motion planner for a fleet of autonomous mobile robots in the presence of hazardous risk situations. First, some risk cases related to hazardous industrial facilities are identified and discussed. Safety requirements associated with the identified risk situations are defined in terms of constraints that must be considered in the trajectory planning problem. For instance, once a robot enters a hazardous area, the remaining robots consider such a hazardous area as a virtual obstacle that must be avoided. Based on these constraints, a receding horizon motion planner is introduced. To provide a fully decentralized scheme, a three-step sequence is provided where each robot presumes a trajectory for other robots belonging to its conflict set. To solve the planning problem, B-spline parametrization and a particle swarm optimization algorithm are used. A numerical simulation has been conducted to show the feasibility of the proposed scheme.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Das, M.S., Sanyal, S., Mandal, S.: Navigation of multiple robots in formative manner in an unknown environment using artificial potential field based path planning algorithm. Ain Shams Eng. J. 13(5), 101675 (2022)
Demesure, G., Defoort, M., Bekrar, A., Trentesaux, D., Djemai, M.: De centralized motion planning and scheduling of AGVs in an FMS. IEEE Trans. Industr. Inf. 14(4), 1744–1752 (2017)
Fu, J., Wen, G., Yu, X., Wu, Z.-G.: Distributed formation navigation of constrained second-order multiagent systems with collision avoidance and connectivity maintenance. IEEE Trans. Cybern. 52(4), 2149–2162 (2020)
Jin, Z., Wang, Z., Zhang, X.: Cooperative control problem of Takagi-Sugeno fuzzy multiagent systems via observer based distributed adaptive sliding mode control. J. Franklin Inst. 359(8), 3405–3426 (2022)
Kim, J.-J., Lee, J.-J.: Trajectory optimization with particle swarm optimization for manipulator motion planning. IEEE Trans. Industr. Inf. 11(3), 620–631 (2015)
Orum, P.: Reducing the potential scope of chemical catastrophes in the us chemical industry: evidence from the EPA’S risk management planning program. NEW SOLUTIONS: J. Environ. Occup. Health Policy 32, 155–160 (2022). https://doi.org/10.1177/10482911221101046
Paccagnan, D., Chandan, R., Marden, J.R.: Utility and mechanism design in multi-agent systems: an overview. Ann Rev Control 53, 315–328 (2022)
Poonganam, S.N.J., Gopalakrishnan, B., Avula, V.S.S.B.K., Singh, A.K., Krishna, K.M., Manocha, D.: Reactive navigation under nonparametric uncertainty through Hilbert space embedding of probabilistic velocity obstacles. IEEE Robot Autom. Lett. 5(2), 2690–2697 (2020)
Sánchez-Torres, J.D., Muñoz-Vázquez, A.J., Defoort, M., Aldana-López, R., Gómez-Gutiérrez, D.: Predefined-time integral sliding mode control of second-order systems. Int. J. Syst. Sci. 51(16), 3425–3435 (2020)
Sattari, F., Macciotta, R., Kurian, D., Lefsrud, L.: Application of Bayesian network and artificial intelligence to reduce accident/incident rates in oil & gas companies. Saf. Sci. 133, 104981 (2021)
Wang, B., Zhu, Y., Li, D., Wu, C.: Evidence-based accident prevention and its application to hazardous chemical storage accident prevention. Process Saf. Environ. Prot. 160, 274–285 (2022)
Wang, X., Zhou, Y., Huang, T., Chakrabarti, P.: Event-triggered adaptive fault-tolerant control for a class of nonlinear multiagent systems with sensor and actuator faults. IEEE Trans. Circuits Syst. I Regul. Pap. 69(10), 4203–4214 (2022)
Yang, J., Kwon, Y.: Human factor analysis and classification system for the oil, gas, and process industry. Process Safety Prog. 41, 728–737 (2022)
Yang, M., Shi, L., Liu, B.: Risks assessment and driving forces of urban environmental accident. J. Clean. Prod. 340, 130710 (2022)
Zhang, D.-W., Liu, G.-P.: Coordinated control of quasilinear multiagent systems via output feedback predictive control. ISA Trans. 128, 58–70 (2022)
Zheng, X., Wang, B., Zhao, Y., Mao, S., Tang, Y.: A knowledge graph method for hazardous chemical management: ontology design and entity identification. Neurocomputing 430, 104–111 (2021)
Acknowledgements
This research work is supported by the Hauts-de-France region and the ANR (French National Research Agency) under project ANR I2RM (Interactive and Intelligent physical assets control system for the Risks Management of hazardous industrial facilities).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Labbadi, M., Defoort, M., Tijjani, A.S., Berger, T., Sallez, Y. (2024). Decentralized Receding Horizon Motion Planner for Multi-robot with Risk Management. In: Borangiu, T., Trentesaux, D., Leitão, P., Berrah, L., Jimenez, JF. (eds) Service Oriented, Holonic and Multi-Agent Manufacturing Systems for Industry of the Future. SOHOMA 2023. Studies in Computational Intelligence, vol 1136. Springer, Cham. https://doi.org/10.1007/978-3-031-53445-4_31
Download citation
DOI: https://doi.org/10.1007/978-3-031-53445-4_31
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-53444-7
Online ISBN: 978-3-031-53445-4
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)