
Abstract
The fresh food industry significantly depends on manual labor, which can make up to 40% of total production costs. Until now, implementing safe robotic automation for gently harvesting fresh produce has been difficult due to the complex and delicate nature of these tasks. The EU-funded SoftGrip Project aims to revolutionize the fresh food sector with technological advancements. By integrating artificial intelligence (AI) and robotic automation, it is possible to achieve gentle harvesting, enhance productivity, and lower labor costs for small and medium-sized European mushroom farms. The innovative smart soft gripper, designed to learn skills from expert harvesters through imitation learning, seeks to provide an economically feasible, scalable, and environmentally friendly solution, transforming the mushroom cultivation industry and the wider fruit market.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
References
Sanchez, J., Corrales, J.-A., Bouzgarrou, B.-C., Mezouar, Y.: Robotic manipulation and sensing of deformable objects in domestic and industrial applications: a survey. Int. J. Robot. Res. 37(7), 688–716 (2018)
Teagasc. Horticulture input costs 2021 - impact assessment, 2021. https://www.teagasc.ie/publications/2021/Horticulture-Input-Costs-2021---Impact-Assessment.php
Singh, M., Kamal, S., Sharma, V.P.: Status and trends in world mushroom production-iii-world production of different mushroom species in 21st century (2021)
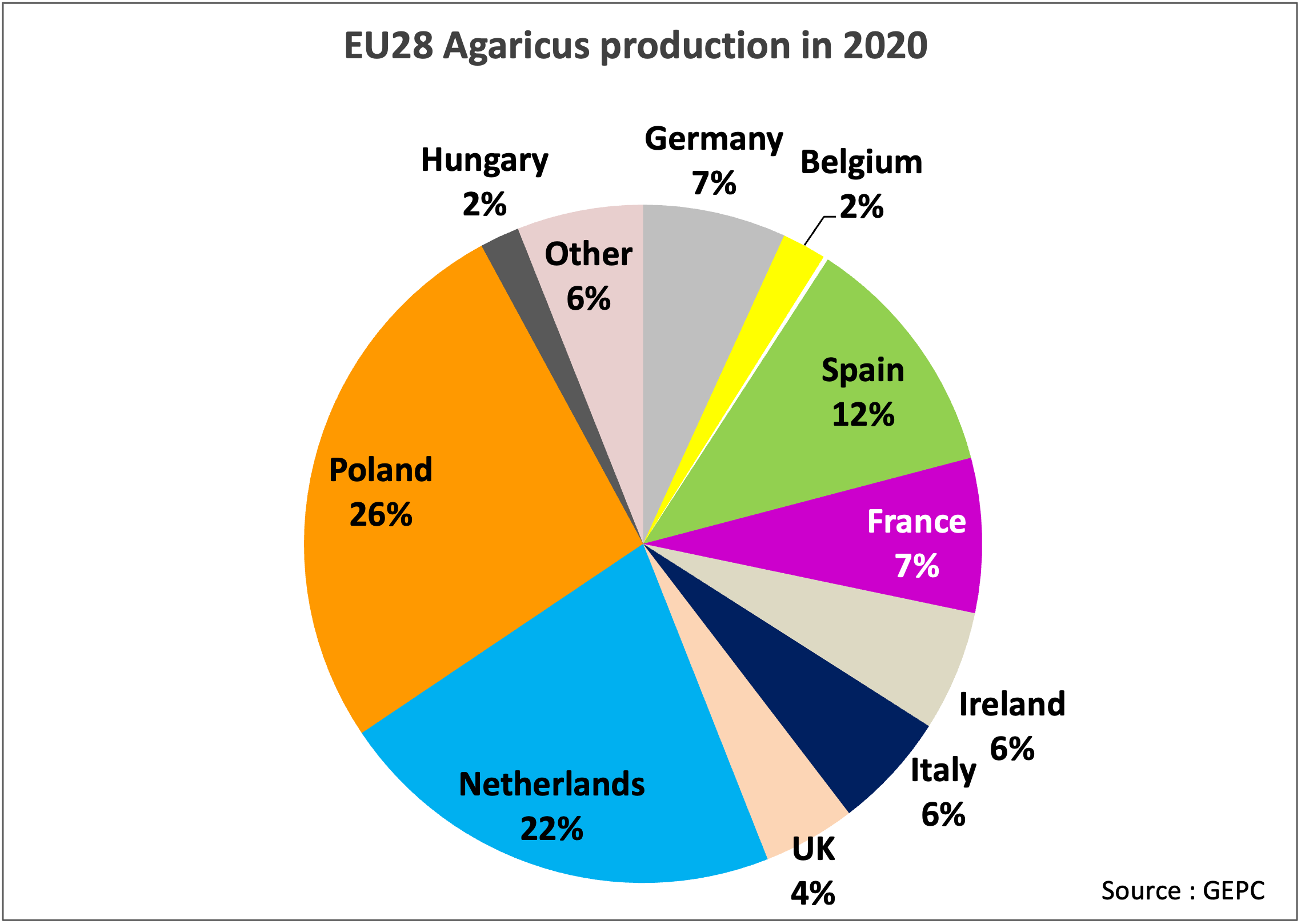
EMGG. European mushroom growers group - production figures, 2020. http://www.infochampi.eu/wp-content/uploads/2023/02/Sans-titre.png
Elfferich, J.F., Dodou, D., Della Santina, C.: Soft robotic grippers for crop handling or harvesting: a review. IEEE Access 10, 75428–75443 (2022)
Rowley, J.H.: Developing flexible automation for mushroom harvesting (agaricus bisporus). University of Warwick, 2009
Acknowledgement
The authors thank all the members of the SoftGrip consortium for their valuable contribution. This work was supported by the European Union’s Horizon 2020 through the SoftGrip project (contract 101017054).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

{kind=link}
Cite this paper
Pagliarani, N. et al. (2024). SoftGrip: Towards a Soft Robotic Platform for Automatized Mushroom Harvesting. In: Secchi, C., Marconi, L. (eds) European Robotics Forum 2024. ERF 2024. Springer Proceedings in Advanced Robotics, vol 32. Springer, Cham. https://doi.org/10.1007/978-3-031-76424-0_9
Download citation
DOI: https://doi.org/10.1007/978-3-031-76424-0_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-76423-3
Online ISBN: 978-3-031-76424-0
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)