
Abstract
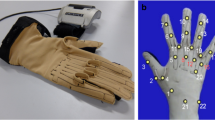
This work aims at defining a suitable postural synergies subspace for the DEXMART Hand from observation of human hand grasping postures. Previous works were carried out on a preliminary prototype (the UB Hand IV), without neither proprioceptive integrated sensors nor external sensors, by means of a joint-to- joint mapping technique. Using an RGB camera and depth sensor for 3D motion capture, the human hand palm pose and fingertip positions have been measured for a reference set of grasping postures. The proposed method for the determination of the synergies subspace is based on the kinematics mapping from the human hand to the robotic hand using data from experiments involving five subjects. The subjects’ hand configurations have been mapped to the robotic hand by matching the hand pose and fingertip positions and applying a closed-loop inverse kinematic algorithm. Suitable scaling factors have been used to adapt the DEXMART Hand kinematics to the subjects’ hand dimension. By means of Principal Component Analysis (PCA), the kinematic patterns of the first three predominant synergies have been computed and a brief comparison with the previous method and kinematics is reported. Finally, a synergy-based control strategy has been used for testing the efficiency of the grasp synthesis method.
This research has been partially funded by the EC Seventh Framework Programme (FP7) under grant agreement no. 287513 for the IP SAPHARI (Safe and Autonomous Physical Human-Aware Robot Interaction).
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


References
DEXMART Project website, http://www.dexmart.eu/
Berselli, G., Borghesan, G., Brandi, M., Melchiorri, C., Natale, C., Palli, G., Pirozzi, S., Vassura, G.: Integrated mechatronic design for a new generation of robotic hands. In: Proc. IFAC Symposium on Robot Control, Gifu, Japan (2009)
Berselli, G., Piccinini, M., Palli, G., Vassura, G.: Engineering Design of Fluid-Filled Soft Covers for Robotic Contact Interfaces: Guidelines, Nonlinear Modeling, and Experimental Validation. IEEE Trans. on Robotics 27(3), 436–449 (2011)
Berselli, G., Vassura, G.: Differentiated layer design to modify the compliance of soft pads for robotic limbs. In: Proc. IEEE Int. Conf. on Robotics and Automation, Kobe, Japan, pp. 1285–1290 (2009)
Biagiotti, L., Lotti, F., Melchiorri, C., Palli, G., Tiezzi, P., Vassura, G.: Development of UB Hand 3: Early results. In: Proc. IEEE Int. Conf. on Robotics and Automation, Barcelona, Spain, pp. 4488–4493 (2005)
De Maria, G., Natale, C., Pirozzi, S.: Force/tactile sensor for robotic applications. Sensors and Actuators A: Physical (2012), doi:10.1016/j.sna.2011.12.042
Drenckhahn, D., Benninghoff, A.: Anatomie: Makroskopische Anatomie, Embryologie und Histologie des Menschen. Zellen-und Gewebelehre, Entwiklungsbiologie, Bewegungsapparat, Herz-Kreisluf-System, Immunsystem, Atem-und Verdauungsapparat. Anatomie: Makroskopische Anatomie, Embryologie und Histologie des Menschen. Urban & Schwarzenberg (1994)
Ficuciello, F., Palli, G., Melchiorri, C., Siciliano, B.: Experimental evaluation of postural synergies during reach to grasp with the UB Hand IV. In: Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, San Francisco, pp. 1775–1780 (2011)
Ficuciello, F., Palli, G., Melchiorri, C., Siciliano, B.: Planning and control during reach to grasp using the three predominant ub hand iv postural synergies. In: Proc. IEEE Int. Conf. Robotics and Automation, Saint Paul, MN, pp. 1775–1780 (2012)
Frati, V., Prattichizzo, D.: Using kinect for hand tracking and rendering in wearable haptics. In: IEEE World Haptics Conference, Istanbul (2011)
Geng, T., Lee, M., Hulse, M.: Transferring human grasping synergies to a robot. Mechatronics 21(1), 272–284 (2011)
Gioioso, G., Salvietti, G., Malvezzi, M., Prattichizzo, D.: Mapping synergies from human to robotic hands with dissimilar kinematics: An object based approach. In: Proc. IEEE Int. Conf. on Robotics and Automation, Workshop on Manipulation Under Uncertainty, Shangai (2011)
Kapandji, I., Honoré, L.: The Physiology of the Joints: The upper limb. The Physiology of the Joints, Churchill Livingstone (2007)
Lotti, F., Vassura, G.: A novel approach to mechanical design of articulated finger for robotic hands. Proc. IEEE/RSJ Int. Conf. on Intelligent Robot and Systems 2, 1687–1692 (2002)
Grebenstein, M., et al.: A method for hand kinematics designers 7 billion perfect hands. In: Proc. of 1st International Conference on Applied Bionics and Biomechanics, Venice, Italy (2010)
Oikonomidis, I., Kyriazis, N., Argyros, A.A.: Full dof tracking of a hand interacting with an object by modeling occlusions and physical constraints. In: Proc. 13th International Conference on Computer Vision, Barcelona, pp. 1260–1264 (2011)
Palli, G., Borghesan, G., Melchiorri, C.: Modeling, identification and control of tendon-based actuation systems. IEEE Trans. on Robotics 28(2), 277–290 (2012)
Palli, G., Melchiorri, C., Vassura, G., Berselli, G., Pirozzi, S., Natale, C., De Maria, G., May, C.: Innovative technologies for the next generation of robotic hands. In: Siciliano, B. (ed.) Advanced Bimanual Manipulation. STAR, vol. 80, pp. 173–217. Springer, Heidelberg (2012)
Palli, G., Natale, C., May, C., Melchiorri, C., Wurtz, T.: Modeling and control of the twisted string actuation system. IEEE/ASME Transactions on Mechatronics 18(2), 664–673 (2013), doi:10.1109/TMECH.2011.2181855
Palli, G., Pirozzi, S.: Miniaturized optical-based force sensors for tendon-driven robots. In: Proc. IEEE Int. Conf. on Robotics and Automation, Shanghai, China, pp. 5344–5349 (2011)
Romero, J., Feix, T., Kjellstrom, H., Kragic, D.: Spatio-temporal modelling of grasping actions. In: Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Taipei, pp. 2103–2108 (2010)
Santello, M., Flanders, M., Soechting, J.: Postural hand synergies for tool use. Journal of Neuroscience 18(23), 10,105–10,115 (1998)
Siciliano, B., Khatib, O. (eds.): Springer Handbook of Robotics. Springer (2008)
Zhang, C., Zhang, Z.: Calibration between depth and color sensors for commodity depth cameras. In: Proc. Int. Conf. on Multimedia and Expo, Barcelona, Spain, pp. 1–6 (2011)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Ficuciello, F., Palli, G., Melchiorri, C., Siciliano, B. (2013). Mapping Grasps from the Human Hand to the DEXMART Hand by Means of Postural Synergies and Vision. In: Desai, J., Dudek, G., Khatib, O., Kumar, V. (eds) Experimental Robotics. Springer Tracts in Advanced Robotics, vol 88. Springer, Heidelberg. https://doi.org/10.1007/978-3-319-00065-7_35
Download citation
DOI: https://doi.org/10.1007/978-3-319-00065-7_35
Publisher Name: Springer, Heidelberg
Print ISBN: 978-3-319-00064-0
Online ISBN: 978-3-319-00065-7
eBook Packages: EngineeringEngineering (R0)