
Abstract
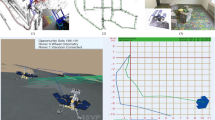
Odometry is an important input to robot navigation systems, and we are interested in the performance of vision-only techniques. In this paper we experimentally evaluate and compare the performance of wheel odometry, monocular feature-based visual odometry, monocular patch-based visual odometry, and a technique that fuses wheel odometry and visual odometry, on a mobile robot operating in a typical indoor environment.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
Konolige, K., Agrawal, M.: Frameslam: From bundle adjustment to real-time visual mapping. IEEE Transactions on Robotics 24(5), 1066–1077 (2008)
Warren, M., McKinnon, D., He, H., Upcroft, B.: Unaided stereo vision based pose estimation. In: Australasian Conference on Robotics and Automation, ARAA, Brisbane (2010)
Sibley, G., Mei, C., Reid, I., Newman, P.: Adaptive relative bundle adjustment. In: Proceedings of Robotics: Science and Systems, Seattle, USA (June 2009)
Pollefeys, M., Van Gool, L., Vergauwen, M., Verbiest, F., Cornelis, K., Tops, J., Koch, R.: Visual modeling with a hand-held camera. International Journal of Computer Vision 59(3), 207–232 (2004)
Olson, C., Matthies, L., Schoppers, H., Maimone, M.: Robust stereo ego-motion for long distance navigation. In: Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, vol. 2, pp. 453–458 (2000)
Corke, P., Strelow, D., Singh, S.: Omnidirectional visual odometry for a planetary rover. In: Proceedings of 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2004), Sendai, Japan (September 2004)
Nistér, D., Naroditsky, O., Bergen, J.R.: Visual odometry. In: CVPR (1), pp. 652–659 (2004)
Nistér, D.: An efficient solution to the five-point relative pose problem. IEEE Trans. Pattern Anal. Mach. Intell. 26(6), 756–777 (2004)
Davison, A., Reid, I., Molton, N., Stasse, O.: Monoslam: Real-time single camera slam. IEEE Transactions on Pattern Analysis and Machine Intelligence 29(6), 1052–1067 (2007)
Klein, G., Murray, D.: Parallel tracking and mapping for small AR workspaces. In: Proc. Sixth IEEE and ACM International Symposium on Mixed and Augmented Reality (ISMAR 2007), Nara, Japan (November 2007)
Clipp, B., Lim, J., Frahm, J.M., Pollefeys, M.: Parallel, real-time visual slam. In: 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, pp. 3961–3968 (2010)
Konolige, K., Bowman, J., Chen, J., Mihelich, P., Calonder, M., Lepetit, V., Fua, P.: View-based maps. The International Journal of Robotics Research 29(8), 941–957 (2010)
Lowe, D.: Object recognition from local scale-invariant features. In: IEEE International Conference on Computer Vision, vol. 2, pp. 1150–1157 (1999)
Bay, H., Ess, A., Tuytelaars, T., Van Gool, L.: Speeded-up robust features (SURF). Comput. Vis. Image Underst. 110, 346–359 (2008)
Milford, M., Schill, F., Corke, P., Mahony, R., Wyeth, G.: Aerial SLAM with a single camera using visual expectation. In: International Conference on Robotics and Automation, Shanghai, China (May 2011)
Grisetti, G., Stachniss, C., Burgard, W.: Improved techniques for grid mapping with rao-blackwellized particle filters. IEEE Transactions on Robotics 23(1), 34–46 (2007)
Konolige, K., Agrawal, M., Sol, J.: Large scale visual odometry for rough terrain. In: Proc. International Symposium on Robotics Research, Hiroshima, Japan (2007)
Mei, C., Sibley, G., Cummins, M., Newman, P., Reid, I.: A constant time efficient stereo SLAM system. In: British Machine Vision Conference (BMVC), London (2009)
Haralick, R.M., Lee, C.N., Ottenberg, K., Nölle, M.: Review and analysis of solutions of the three point perspective pose estimation problem. Int. J. Comput. Vision 13, 331–356 (1994)
Fischler, M.A., Bolles, R.C.: Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 24, 381–395 (1981)
Torr, P.H.S., Zisserman, A.: MLESAC: A new robust estimator with application to estimating image geometry. Computer Vision and Image Understanding 78, 138–156 (2000)
Matas, J., Chum, O.: Randomized ransac with td,d test. Image and Vision Computing 22(10), 837–842 (2004)
Fox, D.: KLD-sampling: Adaptive particle filters. In: Advances in Neural Information Processing Systems, pp. 713–720. MIT Press (2001)
Johnson, A., Goldberg, S., Cheng, Y., Matthies, L.: Robust and efficient stereo feature tracking for visual odometry. In: IEEE International Conference on Robotics and Automation, pp. 39–46 (May 2008)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Murphy, L. et al. (2013). Experimental Comparison of Odometry Approaches. In: Desai, J., Dudek, G., Khatib, O., Kumar, V. (eds) Experimental Robotics. Springer Tracts in Advanced Robotics, vol 88. Springer, Heidelberg. https://doi.org/10.1007/978-3-319-00065-7_58
Download citation
DOI: https://doi.org/10.1007/978-3-319-00065-7_58
Publisher Name: Springer, Heidelberg
Print ISBN: 978-3-319-00064-0
Online ISBN: 978-3-319-00065-7
eBook Packages: EngineeringEngineering (R0)