
Abstract
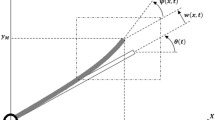
In this paper, vibration suppression of a flexible beam on a moving cart is investigated based on sliding mode control (SMC). A linear model which describes the motion of the beam-cart system, as well as the vibrational motion of the beam, are firstly derived. In the proposed control strategy, a PD controller is used to control the position of the cart, and a corrector switching law is added to attenuate the beam vibration. Indeed, the linear controller plays the role of the equivalent control law to make the states of the system reach the surface. Simulation and experimental results are given to demonstrate de effectiveness of the proposed control strategy.
This work has been supported by the Spanish Ministry of Economy and Competitiveness under the project DPI2012-37062-C02-02.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


References
Benosman, A., Vey, G.L.: Control of flexible manipulators: A survey. Robotica 22(5), 533–545 (2004)
Hu, J., Zhu, D.: Vibration control of smart structure using sliding mode control with observer. Journal of Computers 7(2), 411–418 (2012)
Gu, H., Song, G., Malki, H.: Chattering-free fuzzy adaptive robust sliding-mode vibration control of a smart flexible beam. Smart Materials and Structures 17(3), 035007 (2008)
Hu, Q., Wang, Z., Gao, H.: Sliding mode and shaped input vibration control of flexible systems. IEEE Transactions on Aerospace and Electronic Systems 44(2), 503–519 (2008)
Pai, M.C., Sinha, A.: Sliding mode output feedback control of vibration in a flexible structure. Journal of Dynamic Systems, Measurement, and Control 129(6), 851–855 (2007)
Banavar, R., Dey, B.: Stabilizing a flexible beam on a cart: A distributed port-hamiltonian approach. Journal of Nonlinear Science 20, 131–151 (2010)
Ghaith, F.A., Hamdan, M.N.: Dynamic modeling and control of elastic beam fixed on a moving cart and carrying lumped tip. Jordan Journal of Mechanical and Industrial Engineering 5(1), 61–70 (2011)
Park, S., Kim, B.K., Youm, Y.: Single-mode vibration suppression for a beam-mass-cart system using input preshaping with a robust internal-loop compensator. Journal of Sound and Vibration 241(4), 693–716 (2001)
Lin, J., Chao, W.-S.: Vibration suppression control of beam-cart system with piezoelectric transducers by decomposed parallel adaptive neuro-fuzzy control. Journal of Vibration and Control 15(12), 1885–1906 (2009)
Mamani, G., Becedas, J., Feliu, V.: Sliding mode tracking control of a very lightweight single-link flexible robot robust to payload changes and motor friction. Journal of Vibration and Control 18(8), 1141–1155 (2012)
Chang, J.-L.: On chattering-free dynamic sliding mode controller design. Journal of Control Science and Engineering 2012, 564906 (2012)
O’Toole, M.D., Bouazza-Marouf, K., Kerr, D.: Chatter Suppression in Sliding Mode Control: Strategies and Tuning Methods. In: ROMANSY 18 Robot Design, Dynamics and Control, vol. 524, pp. 109–116. Springer (2010)
Chen, M.S., Chen, C.H., Yang, F.Y.: An LTR-observer-based dynamic sliding mode control for chattering reduction. Automatica 43(6), 1111–1116 (2007)
Lee, H., Utkin, V.I.: Chattering suppression methods in sliding mode control systems. Annual Reviews in Control 31(2), 179–188 (2007)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer International Publishing Switzerland
About this paper
Cite this paper
HosseinNia, S.H., Tejado, I., Torres, D., Vinagre, B.M. (2014). Vibration Suppression Controller for a Flexible Beam on a Cart Using SMC. In: Armada, M., Sanfeliu, A., Ferre, M. (eds) ROBOT2013: First Iberian Robotics Conference. Advances in Intelligent Systems and Computing, vol 253. Springer, Cham. https://doi.org/10.1007/978-3-319-03653-3_11
Download citation
DOI: https://doi.org/10.1007/978-3-319-03653-3_11
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-03652-6
Online ISBN: 978-3-319-03653-3
eBook Packages: EngineeringEngineering (R0)