
Abstract
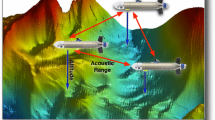
This paper addresses the problem of real-time adaptive sampling using a coordinated fleet of Autonomous Underwater Vehicles (AUVs). The system setup consists of one leader AUV and one or more follower AUVs, all equipped with conductivity, temperature and depth (CTD) sensor devices and capable of running in real-time an on-line unsupervised learning computer algorithm that uses and updates Gaussian Mixture Models (GMMs) to model the CTD data that is being acquired in real-time. The path to be traced by the leader is predefined. The followers path will depend on the CTD data. More precisely, during each resurfacing of the AUVs (and this has to be done in a coordinated fashion), every follower AUV receives the GMM hypothesis of the leader and computes the variational distance error between its own GMM and the received one. This error, that provides a notion of how different is the CTD data of each follower from the leader, is used to reconfigure the formation by scaling the distance between the AUVs in the formation (making a zoom-in and zoom-out), in order to improve the efficiency of the CTD data acquisition in a given region. The simulation results show the feasibility of the proposed strategy in uniform and more complex environments.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
Runnalls, A.R.: Kullback-Leibler approach to Gaussian mixture reduction. IEEE Transactions on Aerospace and Electronic Systems 43(3), 989–999 (2007)
Fiorelli, E., Leonard, N.E., Bhatta, P., Paley, D.A., Bachmayer, R.: IEEE Journal of DM Fratantoni Oceanic Engineering 31(4), 935–948 (2006)
Grnwald, P.D.: The minimum description length principle. MIT press (2007)
Ogren, P., Fiorelli, E., Leonard, N.E.: Cooperative control of mobile sensor networks: Adaptive gradient climbing in a distributed environment. IEEE Transactions on Automatic Control 49(8), 1292–1302 (2004)
Alvarez, A., et al.: Folaga: a low-cost autonomous underwater vehicle combining glider and AUV capabilities. Ocean Engineering 36(1), 24–38 (2009)
Figueiredo, M.A.T., Jain, A.K.: Unsupervised learning of finite mixture models. IEEE Transactions on Pattern Analysis and Machine Intelligence 24(3), 381–396 (2002)
Bishop, C.M.: Pattern recognition and machine learning, vol. 4(4). Springer, New York (2006)
Li, D., Xu, L., Goodman, E.: On-line EM variants for multivariate normal mixture model in background learning and moving foreground detection. Journal of Mathematical Imaging and Vision 48(1), 114–133 (2014)
Titterington, D.M.: Recursive parameter estimation using incomplete data. Journal of the Royal Statistical Society. Series B (Methodological), 257–267 (1984)
Leonard, N.E., Fiorelli, E.: Virtual leaders, artificial potentials and coordinated control of groups. In: Proceedings of the 40th IEEE Conference on Decision and Control, 2001, vol. 3, pp. 2968–2973. IEEE (2001)
Carroll, K.P., McClaran, S.R., Nelson, E.L., Barnett, D.M., Friesen, D.K., William, G.N.: AUV path planning: an A* approach to path planning with consideration of variable vehicle speeds and multiple, overlapping, time-dependent exclusion zones. In: Proceedings of the 1992 Symposium on Autonomous Underwater Vehicle Technology, AUV 1992, pp. 79–84, June 2–3, 1992
Cover, T.M., Thomas, J.A.: Elements of Information Theory. John Wiley & Sons, November 28, 2012
Yilmaz, N.K., et al.: Path planning of autonomous underwater vehicles for adaptive sampling using mixed integer linear programming. IEEE Journal of Oceanic Engineering 33(4), 522–537 (2008)
Eickstedt, D.P., Benjamin, M.R., Curcio, J.: Behavior based adaptive control for autonomous oceanographic sampling. In: IEEE International Conference on Robotics and Automation (2007)
Khoshrou, A., Aguiar, A.P.: Unsupervised learning of gaussian mixture models in the presence of dynamic environments. In: CONTROLO 2014–Proceedings of the 11th Portuguese Conference on Automatic Control. Springer International Publishing (2015)
Dempster, A.P., Laird, N.M., Rubin, D.B.: Maximum likelihood from incomplete data via the EM algorithm. Journal of the royal statistical society. Series B (methodological), 1–38 (1977)
Yun, X., et al.: Testing and evaluation of an integrated GPS/INS system for small AUV navigation. IEEE Journal of Oceanic Engineering 24(3), 396–404 (1999)
Zivkovic, Z., van der Heijden, F.: Recursive unsupervised learning of finite mixture models. IEEE Transactions on Pattern Analysis and Machine Intelligence 26(5), 651–656 (2004)
Arandjelovic, O., Cipolla, R.: Incremental learning of temporally-coherent gaussian mixture models. Society of Manufacturing Engineers (SME) Technical Papers, 1–1 (2006)
Hershey, J.R., Olsen, P.A.: Approximating the Kullback Leibler divergence between Gaussian mixture models. In: IEEE International Conference on Acoustics, Speech and Signal Processing, ICASSP 2007, vol. 4. IEEE (2007)
Aguiar, A.P., Hespanha, J.P.: Trajectory-tracking and path-following of underactuated autonomous vehicles with parametric modeling uncertainty. IEEE Transactions on Automatic Control 52(8), 1362–1379 (2007)
Bahr, A., Leonard, J.J., Fallon, M.F.: Cooperative localization for autonomous underwater vehicles. The International Journal of Robotics Research 28(6), 714–728 (2009)
Woolsey, C.A.: Review of marine control systems: Guidance, navigation, and control of ships, rigs and underwater vehicles. Journal of Guidance, Control, and Dynamics 28(3), 574–575 (2005)
Laboratrio de Sistemas e Tecnologia Subaqutica. http://lsts.fe.up.pt/
Smith, R.N., et al.: Autonomous underwater vehicle trajectory design coupled with predictive ocean models: a case study. In: 2010 IEEE International Conference on Robotics and Automation (ICRA). IEEE (2010)
Svec, P., et al.: Dynamics-aware target following for an autonomous surface vehicle operating under COLREGs in civilian traffic. In: 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE (2013)
Maurya, P, Aguiar, A.P., Pascoal, A.M.: Marine vehicle path following using inner-outer loop control. In: 8th IFAC International Conference on Manoeuvring and Control of Marine Craft 2009, September 16–18, 2009, Guaruja-Brazil, p. 6. IFAC International Conference (2009)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Khoshrou, A., Aguiar, A.P., Pereira, F.L. (2016). Adaptive Sampling Using an Unsupervised Learning of GMMs Applied to a Fleet of AUVs with CTD Measurements. In: Reis, L., Moreira, A., Lima, P., Montano, L., Muñoz-Martinez, V. (eds) Robot 2015: Second Iberian Robotics Conference. Advances in Intelligent Systems and Computing, vol 417. Springer, Cham. https://doi.org/10.1007/978-3-319-27146-0_25
Download citation
DOI: https://doi.org/10.1007/978-3-319-27146-0_25
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-27145-3
Online ISBN: 978-3-319-27146-0
eBook Packages: Computer ScienceComputer Science (R0)