
Abstract
We investigate a construction scheme for digital planes that is guided by generalized continued fractions algorithms. This process generalizes the recursive construction of digital lines to dimension three. Given a pair of numbers, Euclid’s algorithm provides a natural definition of continued fractions. In dimension three and above, there is no such canonical definition. We propose a pair of hybrid continued fractions algorithms and show geometrical properties of the digital planes constructed from them.
This work has been partly funded by Dyna3S ANR-13-BS02-0003 research grant.
This work has been partly supported by the CNRS “Laboratoire international associé” LIRCO.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
- Digital planes generation
- GCD algorithms
- Generalized continued fractions algorithms
- Recursive structure
1 Introduction
Over the last years, the study of digital straight lines has gathered much attention. Their properties have been exposed using different approaches and many applications were deduced from them. In particular, it is well known that a digital line has a recursive structure described by the continued fraction development of its slope. See [15] for a survey on digital straightness.
There has been much effort done in order to find analogous results and applications to those on 2D digital lines for 3D digital planes. See [8] for a survey on digital planarity. Works on dual substitutions [1] showed links between the structure of 3D digital planes and generalized continued fractions which lead, in particular, to generation and recognition techniques [3, 12]. In this context, much effort has been directed to the study of the generation of digital planes with totally irrational normal vectors. See, for instance, [14] for a detailed work on this topic.
In [5, 11], the authors investigate a process that, given a normal vector, computes the critical thickness and constructs the thinnest digital plane that is connected. This process is completely directed by the execution of the Fully Subtractive algorithm on the normal vector. Even if their process computes the critical thickness for any normal vector, the construction, which we call the FS-construction, produces a digital plane only for a measure-zero set of vectors which excludes all integer vectors [10]. In the present paper, we propose an attempt to compute a connected digital plane for all vectors \(\mathbf {v} \in {\mathbb N}^3\).
In the field of combinatorics on words, the recursive structure of digital lines has been studied, in particular, via Christoffel words. Recent work by Labbé and Reutenauer [17] extends Christoffel words as subgraphs of the hypercubic lattice in arbitrary dimensions. The motivation for the present paper is to provide a better understanding of the self-similarities of what is called a Christoffel parallelogram in [17]. This is, roughly speaking, the smallest pattern with parallel sides that tiles the digital plane by translation.
We provide a recursive construction scheme for 3D digital planes that is a generic version of the FS-construction. It is generic in the sense that it is parametrized by a generalized continued fraction algorithm, noted GCF-algorithm for short. A GCF-algorithm is an extension of Euclid’s algorithm to higher dimensions. In [5], an inclusion relation between the result of the FS-construction and the construction of digital planes using dual substitutions, more precisely the \(\text {E}_1^*\) formalism, was used in order to show connectedness in specific cases. The same connection between our construction and \(\text {E}_1^*\) is expected, but left for future work. We define new hybrid GCF-algorithms and show that they allow to build a connected digital plane for any rational normal vector.
2 Basic Notions and Notation
Let \(d \geqslant 2\) be an integer. Let \(\left\{ {\mathbf {e}}_i \mid k \in \{1,\dots ,d\} \right\} \) be the canonical basis of \({\mathbb R}^d\), and let \(\langle \cdot , \cdot \rangle \) stand for the usual scalar product on \({\mathbb R}^d\). We note \({\mathbf {0}}\) the origin and \({\mathbf {1}}= \sum _{i=1}^d {\mathbf {e}}_i\) the vector with all coordinates equal to 1. Recall that \(\mathbb {N}_+ := \mathbb {N}{\setminus } \{{\mathbf {0}}\}\). We always suppose that \({\mathbf {v}}\in (\mathbb {N}_+)^d\) and that the coordinates of \({\mathbf {v}}\) are relatively prime. The 1-norm of \({\mathbf {x}}\in \mathbb {R}^d\), noted \(\Vert {\mathbf {x}}\Vert _1\), is given by the sum of the absolute values of its coordinates.
Definition 2.1
The digital hyperplane \(\mathcal {P}({\mathbf {v}},\omega )\) with normal vector \({\mathbf {v}}\in \mathbb {R}^d\) and thickness \(\omega \in \mathbb {R}\) is defined by:
Note that the usual definition of digital hyperplanes includes a shift parameter \(\mu \) which we decide to omit in order to lighten the notation. Moreover, we only consider digital lines (\(d=2\)) and planes (\(d=3\)). For any point \({\mathbf {x}}\in \mathbb {Z}^d\), the quantity \({\left\langle {{\mathbf {x}},{\mathbf {v}}}\right\rangle }\) determines if \({\mathbf {x}}\) belongs to \(\mathcal {P}({\mathbf {v}},\omega )\) or not. We call \({\left\langle {{\mathbf {x}},{\mathbf {v}}}\right\rangle }\) the height of \({\mathbf {x}}\) (in \(\mathcal {P}({\mathbf {v}},\omega )\)) and note it by \({{\overline{\mathbf {x}}}}\). See Fig. 1 for an illustration.

The inner structure of digital lines and planes. Left: the digital line \(\mathcal {P}((-1,3),4)\). The line \({{\overline{\mathbf {x}}}}=0\) contains the lowest points, while the line \({{\overline{\mathbf {x}}}}=3\) contains the highest points. Right: the digital plane \(\mathcal {P}((1,2,3),6)\). The numbers indicate the height of each points. The highest points are highlighted showing that they form a regular lattice. In both cases, two points at same height define a period vector.
Two points at the same height define a period vector, so that \(\mathcal {P}({\mathbf {v}},\omega )\) is invariant under a translation by that vector. Given \(({\mathbf {b}}_i)_{i\in \{1,\dots ,d-1\}}\) a basis of the lattice \(\{{\mathbf {x}}\in \mathbb {Z}^d \mid {{\overline{\mathbf {x}}}}=0 \}\) and a set \(S \subset \mathbb {Z}^d\) such that for each integer \(h \in \mathbb {Z}\), \(\{{\mathbf {x}}\in S \mid {{\overline{\mathbf {x}}}}= h \} \ne \emptyset \) if and only if \(h \in [0,\omega )\), then
and we say that S provided with the vectors \(({\mathbf {b}}_i)\) spans \(\mathcal {P}({\mathbf {v}},\omega )\).
Two points \({\mathbf {x}}, {\mathbf {y}}\in \mathbb {Z}^d\) are said to be adjacent if \(\Vert {\mathbf {x}}-{\mathbf {y}}\Vert _1 = 1\), which means that all their coordinates are equal except for one that differs by 1. By analogy to graph theory, we say that a subset of \(\mathbb {Z}^d\) is connected if its adjacency graph is connected. In particular, a digital plane \(\mathcal {P}({\mathbf {v}},\omega )\) is always disconnected if \(\omega < \min ({\mathbf {v}})\) and it is always connected if \(\omega > \max ({\mathbf {v}}) + \min \{{\mathbf {v}}_i \mid {\mathbf {v}}_i \ne 0\}\) (see [6], Lemma 5.3).
3 Construction Guided by Continued Fractions
In its additive form, Euclid’s algorithm can be expressed as “given a couple of integers (a, b), subtract the smaller to the larger one, and repeat. When both numbers are equal, their value is the gcd”. It can be expressed in a matricial expression as follows:
so that multiplying vector \(\left( {\begin{matrix} a \\ b \end{matrix}} \right) \) by the output matrix performs one step of the algorithm. Table 1 presents the general construction scheme of digital lines and planes. It requires two inputs, namely a GCF-algorithm and a normal vector. First, we focus on dimension 2. In this case, there is a canonical GCF-algorithm: \(\mathbf {Euclid}\). The construction is simply a geometrical reinterpretation of the combinatorial construction of Christoffel words by the Christoffel tree, see [2] (Chap. 1, Sect. 7). The result is a set of points called pattern. By analogy with the terminology used in [17], we say that a pattern is made of a body, noted \(B_n\), and legs, noted
\(L_n\). Euclid’s algorithm ensures that there exists N such that \({\mathbf {v}}_N = (1,1)\). The approximations \(({\mathbf {a}}_n)\) correspond to the values encountered while going down in the Christoffel tree (or equivalently the Stern-Brocot tree), starting from the root \({\mathbf {a}}_0 = (1,1)\) and ending after N steps at \({\mathbf {a}}_N = {\mathbf {v}}_0\). See Fig. 2 for an example.

Example of the construction scheme using Euclid’s algorithm and the input vector \({\mathbf {v}}= (2,5)\). By convention, \(\bullet \in B_n\) and \(\circ \in L_n\). At step 3, \({\mathbf {v}}_3 = {\mathbf {1}}\) and thus \({\mathbf {a}}_3 = {\mathbf {v}}\) and \(B_3 \cup L_3\) forms the main pattern of \(\mathcal {P}((2,5),7)\).
The main difficulty in order to use this construction in dimension three is that there is no canonical extension of Euclid’s algorithm. Instead, there exists a wide variety of GCF-algorithms (see for instance [18] or [16]). Among all GCF-algorithms, we only focus on the three following ones in the scope of this paper. Given three non-negative numbers,
-
Selmer, noted \(\mathbf {S}\) : subtract the smallest value to the largest one.
-
Brun, noted \(\mathbf {B}\) : subtract the middle value to the largest one.
-
Fully Subtractive, noted \(\mathbf {FS}\) : subtract the smallest value to the two others.
Obviously, the action of each of these GCF-algorithms may be expressed by a matrix product. Moreover, with these three algorithms, designating the index of the entry that is subtracted is unambiguous. Here are some basic properties of the construction given by Table 1 with \(d=3\).
Property 3.1
Let \(\mathbf {X}\) be a GCF-algorithm such that each step is either \(\mathbf {S}\), \(\mathbf {B}\) or \(\mathbf {FS}\). For each \(n \geqslant 0\),
-
(1)
\({\mathbf {v}}_n = {M_{n}\cdots M_1} {\mathbf {v}}\).
-
(2)
if \({\mathbf {v}}_n = {\mathbf {1}}\), then \({\mathbf {a}}_n={\mathbf {v}}\).
-
(3)
\(B_n = \left\{ \sum _{i \in I}{\mathbf {t}}_i \mid I \subseteq \{1,\dots ,n\}\right\} \).
-
(4)
the coordinates of \({\mathbf {v}}_n\) are non-negative.
-
(5)
for each \(i\in \{1,2,3\}\), the height of \({M_1^\top \cdots M_{n}^\top } {\mathbf {e}}_i\) is equal to the i-th coordinate of \({\mathbf {v}}_n\).
-
(6)
\({{\overline{\mathbf {t}}}}_n\), the height of \({\mathbf {t}}_n\), is the value of the coordinate of \({\mathbf {v}}_{n-1}\) that is subtracted to some other coordinate(s) by \(M_n\), in order to compute \({\mathbf {v}}_n\).
-
(7)
for each \(i\in \{1,2,3\}\), let \({\mathbf {x}}= {M_1^\top \cdots M_{n}^\top } {\mathbf {e}}_i\). The vector \({\mathbf {x}}\) is a Bezout vector for \({\mathbf {a}}_n\), that is \({\left\langle {{\mathbf {x}},{\mathbf {a}}_n}\right\rangle } = 1\).
Proof
Properties (1), (2) and (3) are straightforward. Property (4) is deduced from the definition of the continued fraction algorithm. For (5), \(\langle {M_1^\top \cdots M_{n}^\top }\) \({\mathbf {e}}_{i}, {\mathbf {v}}\rangle = {\left\langle { {\mathbf {e}}_{i}, {M_{n}\cdots M_1} {\mathbf {v}}}\right\rangle } = {\left\langle {{\mathbf {e}}_{i},{\mathbf {v}}_n}\right\rangle }\). For (6), the value of the coordinate of \({\mathbf {v}}_{n-1}\) that is subtracted is not modified by the action of \(M_n\), in other words \({\left\langle {{\mathbf {v}}_{n-1},{\mathbf {e}}_{\delta _n}}\right\rangle } = {\left\langle {{\mathbf {v}}_{n},{\mathbf {e}}_{\delta _n}}\right\rangle }\). Finally, for (7), \({\left\langle {{M_1^\top \cdots M_{n}^\top }{\mathbf {e}}_i,{\mathbf {a}}_n}\right\rangle } = {\left\langle {{\mathbf {e}}_i,{\mathbf {1}}}\right\rangle } = 1\). \(\square \)
Obviously, geometric properties of the objects generated depend on the choice of the GCF-algorithm. Here are some properties that are expected from the generated patterns:
-
They must be included in the digital plane \(\mathcal {P}({\mathbf {v}},\Vert {\mathbf {v}}\Vert _1)\).
-
They should form a connected set of points.
-
Period vectors should be deduced from them.
-
They should contain points at every height.
-
They should be as small as possible, to avoid redundancy.
3.1 General Properties of the Construction
Even though the construction scheme from Table 1 produces infinite sequences, we only consider a finite number of steps. In dimension two, Euclid’s algorithm always brings vector \({\mathbf {v}}\) to \({\mathbf {1}}\) (recall that \({\mathbf {v}}\) is assumed to have relatively prime coordinates). This is the halt condition for the algorithm. In dimension three, a GCF-algorithm may produce a sequence \(({\mathbf {v}}_n)_{n \geqslant 0}\) such that \({\mathbf {1}}\) does not appear in it. For instance, with the \(\mathbf {FS}\) GCF-algorithm, if there exists n such that \({\mathbf {v}}_n = (1,1,2)\), then \({\mathbf {v}}_{n+1} = (1,0,2)\). Obviously, \({\mathbf {v}}_{n'} \ne {\mathbf {1}}\) for all \(n' \geqslant n\). For now, we focus on the case where \({\mathbf {1}}\) does appear in \(({\mathbf {v}}_n)_{n \geqslant 0}\).
Definition 3.2
Let \(\mathbf {X}\) be a GCF-algorithm and \({\mathbf {v}}\) a vector with relatively prime coordinates. The length, noted \({{{\mathrm{length}}}_{\mathbf {X}}({\mathbf {v}})}\), is, if it exists, the smallest integer \(N \geqslant 0\) such that \({\mathbf {v}}_N = {\mathbf {1}}\).
In Sect. 4.1, we provide two new GCF-algorithms and show (Lemma 4.1) that, if \(\mathbf {X}\) is one of these, then \({{{\mathrm{length}}}_{\mathbf {X}}({\mathbf {v}})}\) exists. Under such assumption, the points of the body are always included in a digital plane of normal vector \({\mathbf {v}}\).
Proposition 3.3
Let \(\,\mathbf {X}\,\) be a GCF-algorithm such that each step is either \(\,\mathbf {S}\), \(\,\mathbf {B}\) or \(\,\mathbf {FS}\,\) and \(N={{{\mathrm{length}}}_{\mathbf {X}}({\mathbf {v}})}\) exists. For each \(n \in \{0,1,\dots ,N\}\), \(B_n \subseteq \mathcal {P}({\mathbf {v}},\Vert {\mathbf {v}}\Vert _1-2)\).
Proof
For each \(n \geqslant 1\), let \(g_n\) be the value of the coordinate of \({\mathbf {v}}_{n-1}\) that is subtracted. From Property 3.1 (6), this value is equal to the height of \({\mathbf {t}}_n\). From Property 3.1 (3), given a point \({\mathbf {x}}\in B_n\), there exists a subset \(I \subset \{1,\dots ,n\}\) such that \({\mathbf {x}}= \sum _{i \in I}{{\mathbf {t}}_i}\) and, by linearity, \({{\overline{\mathbf {x}}}}= \sum _{i \in I} g_i\). On one hand, each \(g_i\) being non-negative, \(0 \leqslant {{\overline{\mathbf {x}}}}\). On the other hand, since each \(g_i\) is subtracted to one or two coordinates of \({{\overline{\mathbf {v}}}}_{n-1}\) while keeping its coordinates non-negative, we have that \(\sum _{i \in I} g_i \leqslant \Vert {\mathbf {v}}_0\Vert _1 - \Vert {\mathbf {v}}_N\Vert _1\). Thus, \({\mathbf {x}}\in \mathcal {P}({\mathbf {v}},\Vert {\mathbf {v}}\Vert _1-2)\). \(\square \)
The following proposition states that the legs define linearly independent period vectors. In Sect. 4.2, we show that these vectors may be used with the corresponding pattern in order to span a digital plane.
Proposition 3.4
Let \(\mathbf {X}\) be a GCF-algorithm such that each step is either \(\mathbf {S}\), \(\mathbf {B}\) or \(\mathbf {FS}\) and \(N={{{\mathrm{length}}}_{\mathbf {X}}({\mathbf {v}})}\) exists. For each \(n \in \{0,1,\dots ,N\}\), let \(\{{\mathbf {l}}_1,{\mathbf {l}}_2,{\mathbf {l}}_3\} = L_n\) (see Table 1). The differences \(({\mathbf {l}}_2-{\mathbf {l}}_1\), \({\mathbf {l}}_3-{\mathbf {l}}_1)\) form a basis of the lattice \(\{{\mathbf {x}}\in \mathbb {Z}^3 \mid {\left\langle {{\mathbf {x}},{\mathbf {a}}_n}\right\rangle } = 0\}\).
Proof
(Sketch). By Property 3.1 (7), we have \({\left\langle {{\mathbf {l}}_1,{\mathbf {a}}_n}\right\rangle } = {\left\langle {{\mathbf {l}}_2,{\mathbf {a}}_n}\right\rangle } = {\left\langle {{\mathbf {l}}_3,{\mathbf {a}}_n}\right\rangle }\), which implies that their differences are in the lattice \(\{{\mathbf {x}}\in \mathbb {Z}^3 \mid {{\overline{\mathbf {x}}}}= 0\}\). The fact that \(({\mathbf {l}}_2-{\mathbf {l}}_1\), \({\mathbf {l}}_3-{\mathbf {l}}_1)\) form a basis of the lattice is deduced from the fact that the matrix \({M_1^\top \cdots M_{n}^\top }\) is unimodular, since it is a product of unimodular matrices.
4 The Choice of a GCF-Algorithm
In order to build a digital plane with normal vector \({\mathbf {v}}\), one should use a GCF-algorithm that reduces \({\mathbf {v}}\) to \({\mathbf {1}}\). Indeed, if \({\mathbf {v}}_N = {\mathbf {1}}\), then, by Property 3.1 (2), \({\mathbf {a}}_N = {\mathbf {v}}\) and Proposition 3.4 states that the legs \(L_N\) define linearly independent period vectors of \(\mathcal {P}({\mathbf {v}},\omega )\).
The \(\mathbf {FS}\) GCF-algorithm appeared naturally in the study of the topological properties of digital planes [9]. Subsequent work [4, 5, 10, 11] showed that the geometry of a digital plane is strongly linked to the execution of \(\mathbf {FS}\) on its normal vector.
Given a vector \({\mathbf {v}}\) for which \(N = {{{\mathrm{length}}}_{\mathbf {FS}}({\mathbf {v}})}\) is defined, a point \(l \in L_N\) is such that \(\overline{l} = \lfloor \frac{\Vert {\mathbf {v}}\Vert _1}{2}\rfloor \), the set \(B_N\) is connected and contains exactly one point at each height from 0 to \(\lfloor \frac{\Vert {\mathbf {v}}\Vert _1}{2}\rfloor -1\). The set \(B_N \cup \{l\}\) is a minimal pattern that not only spans \(\mathcal {P}({\mathbf {v}}, \frac{\Vert {\mathbf {v}}\Vert _1}{2})\), but tiles the digital plane, since the points of the translated copies of the pattern never overlap. That being said, for most of the normal vectors \({\mathbf {v}}\), \(\mathbf {FS}\) “fails”, which means that \({{{\mathrm{length}}}_{\mathbf {FS}}({\mathbf {v}})}\) is not defined [13]. For instance, in dimension 3, there are two cases where this happens. The first one is when dealing with a vector \({\mathbf {v}}\) such that a vector \({\mathbf {u}}\) of the form \((a,b,a+b+c)\), with \(a,b \geqslant 1\), \(c \geqslant 0\), appears in the sequence \(({\mathbf {v}}_n)_{n \geqslant 0}\).
In other words, when one coordinate is bigger or equal to the sum of the two others at some point of the execution of \(\mathbf {FS}\). Iterating the \(\mathbf {FS}\) algorithm on \({\mathbf {u}}\) is equivalent to running Euclid’s algorithm on (a, b) since the z-coordinate always remains the biggest one. This means that the value of c has no influence on the points computed in the sequence \((B_n)_{n \geqslant 0}\), and thus the geometry of the digital plane \(\mathcal {P}({\mathbf {v}}, \omega )\) cannot be described by the patterns generated. Another type of vectors which \(\mathbf {FS}\) does not reduce to \({\mathbf {1}}\) is those such that a vector of the form (a, a, b) with \(a<b\) appears in the sequence \(({\mathbf {v}}_n)_{n \geqslant 0}\). In such case, the action of \(\mathbf {FS}\) produces a vector of the form \((a,0,b-a)\), which is a fixed point for \(\mathbf {FS}\).
4.1 Hybrid GCF-Algorithms
The idea of mixing two different GCF-algorithms appears in [7], where the authors investigate the generation of infinite words by iteration of morphisms as approximations of digital lines. We now define two new GCF-algorithms. The main idea is to emulate \(\mathbf {FS}\) as much as possible, except for the cases where it “fails” and, in such case, use \(\mathbf {S}\) (Selmer) or \(\mathbf {B}\) (Brun) instead.
Table 2 details the \(\mathbf {FSS}\) (Fully Subtractive Selmer) and \(\mathbf {FSB}\) (Fully Subtractive Brun) GCF-algorithms with the matrices provided in Table 3.
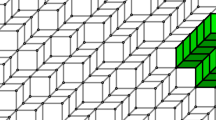
The scheme of the \(\mathbf {FSS}\) (resp. \(\mathbf {FSB}\)) GCF-algorithm is “if the largest coordinate is greater or equal to the sum of the two smallest ones or if the two smallest ones are equal, apply the \(\mathbf {S}\) (resp. \(\mathbf {B}\) ) reduction; otherwise, apply the \(\mathbf {FS}\) reduction” (Fig. 3).

Example of the construction scheme using the \(\mathbf {FSB}\) GCF-algorithm and normal vector \({\mathbf {v}}= (4,5,6)\). At step 3, \({\mathbf {v}}_3 = {\mathbf {1}}\) and thus \({\mathbf {a}}_3 = {\mathbf {v}}\). For each point \({\mathbf {x}}\in L_3\), \({{\overline{\mathbf {x}}}}= 8\) and the body has a point at each height from 0 to 7. The spanning \(\{(B_3 \cup L_3) + k(-4,2,1) + l(-3,0,2) \mid k,l \in \mathbb {Z}\}\) is the digital plane \(\mathcal {P}((4,5,6),9)\).
Unlike what happens with the \(\mathbf {FS}\), \(\mathbf {S}\) and \(\mathbf {B}\) GCF-algorithms, \({{{\mathrm{length}}}_{\mathbf {FSS}}({\mathbf {v}})}\) and \({{{\mathrm{length}}}_{\mathbf {FSB}}({\mathbf {v}})}\) always exist.
Lemma 4.1
Let \({\mathbf {v}}\in \mathbb {N}_+^3\), be a vector with relatively prime coordinates, then \({{{\mathrm{length}}}_{\mathbf {FSS}}({\mathbf {v}})}\) and \({{{\mathrm{length}}}_{\mathbf {FSB}}({\mathbf {v}})}\) both exist.
Proof
With both algorithms, \((\Vert {\mathbf {v}}_n\Vert _1)_{n \geqslant 0}\) forms a decreasing integer sequence. More precisely, this sequence is strictly decreasing as long as none of the coordinates is equal to zero, which forces that, inevitably, one coordinate must reach zero. Let N be the smallest integer such that \(\min ({\mathbf {v}}_{N+1})=0\). For short, let \((a,b,c) = {\mathbf {v}}_N\) and, w.l.o.g. assume that \(a \leqslant b \leqslant c\). Let \(M = \mathbf {FSS}({\mathbf {v}}_N)\) (resp. \(\mathbf {FSB}({\mathbf {v}}_N)\)). There are three possibilities for M:
-
\(M = {\mathbf M}^{FS }_{1}\), this case is impossible, since both \(\mathbf {FSS}\) and \(\mathbf {FSB}\) require that \({\mathbf {v}}_N\) is such that \(a<b\) and \(a<c\), so that \({\mathbf {v}}_{N+1} = (a,b-a,c-a)\) has no coordinate equal to zero.
-
\(M = {\mathbf M}^{S }_{123}\), in such case, \({\mathbf {v}}_{N+1} = (a,b,c-a)\), so that \(a=b=c\).
-
\(M = {\mathbf M}^{B }_{123}\), in such case, \({\mathbf {v}}_{N+1} = (a,b,c-b)\), so that \(b=c\). Moreover, \(a=b\) since, otherwise, \(a+b>c\), \(a\ne b\) and \(\mathbf {FSB}({\mathbf {v}}_N)\) returns \({\mathbf M}^{FS }_{1}\).
The uniqueness of N is obvious since \({\mathbf {v}}_N = {\mathbf {1}}\) implies \(\min ({\mathbf {v}}_{N+1}) = 0\) and each coordinate is non-increasing. \(\square \)
4.2 Generating a Digital Plane
We now show the main geometrical properties of our construction. First, we show that the points of the patterns \(B_n\) and \(B_n \cup L_n\) are connected. Since we already know (see Proposition 3.4) that, at the last step, the legs define period vectors that send points of the legs to other points of the legs, the spanning of a pattern by these period vectors is a connected set. Then, we show that \(B_N\), for \(N = {{{\mathrm{length}}}_{\mathbf {FSS}}({\mathbf {v}})}\) (resp. \(\mathbf {FSB}\)), contains at least one point at each height, which ensures that the spanning is a digital plane.
Theorem 4.2
Let \({\mathbf {v}}\in \mathbb {N}_+^3\) be a vector with relatively prime coordinates and let \(N={{{\mathrm{length}}}_{\mathbf {FSS}}({\mathbf {v}})}\) (resp. \(\mathbf {FSB}\)). For each \(n \in \{0,1,\dots ,N\}\), the sets \(B_n\) and \(L_n\) are disjoint, and both \(B_n\) and \(B_n \cup L_n\) are connected.
Proof
Let \({\mathbf {x}}\in L_n\). By definition, there exists \(i \in \{1,2,3\}\) such that \({\mathbf {x}}= {\mathbf {h}}_n + {M_1^\top \cdots M_{n}^\top } {\mathbf {e}}_i\). The height of \({M_1^\top \cdots M_{n}^\top } {\mathbf {e}}_i\) is strictly greater than zero since it is equal to the value of the i-th coordinate of \({\mathbf {v}}_n\). This implies that \({\mathbf {x}}\not \in B_n\) since \({{\overline{\mathbf {x}}}}> {{\overline{\mathbf {h}}}}_n\) and \({\mathbf {h}}_n\) is the highest point of \(B_n\).
In order to show that \(B_n \cup L_n\) is connected, it suffices to see that, for all \(n \geqslant 0\) and all \(i \in \{1,2,3\}\),
Indeed, Eq. (1) implies that the points of \(L_n\) are adjacent to points of \(B_n\). It also implies that, at each step of the recursive construction, the set \(B_{n-1}+{\mathbf {t}}_n\) contains a point, namely \({\mathbf {h}}_{n-1} + {M_1^\top \cdots M_{n}^\top } {\mathbf {e}}_{\delta _n}\), that is adjacent to a point of \(B_{n-1}\), so that the connectedness of \(B_{n-1}\) implies the one of \(B_{n}\).
By recurrence, for \(n=0\), \({\mathbf {h}}_0 + {\mathbf {e}}_i - {\mathbf {e}}_i = {\mathbf {0}}\in B_0\). Now, suppose that (1) is true for n, and we show the result for \(n+1\). There are two cases to consider.
-
If the action of \(M_{n+1}\) does not modify the i-th coordinate of \({\mathbf {v}}_n\), that is \(M_{n+1}^\top {\mathbf {e}}_i = {\mathbf {e}}_i\), then
$$ {\mathbf {h}}_{n+1} + {M_1^\top \cdots M_{{n+1}}^\top } {\mathbf {e}}_i - {\mathbf {e}}_i = \underbrace{{\mathbf {h}}_{n} + {M_1^\top \cdots M_{n}^\top } {\mathbf {e}}_i - {\mathbf {e}}_i}_{\in B_n} + {\mathbf {t}}_{n+1} \in B_{n+1}. $$ -
Otherwise, the action of \(M_{n+1}\) on the i-th coordinate of \({\mathbf {v}}_n\) is to subtract to it the \(\delta _{n+1}\)-th coordinate, which implies that \(M_{n+1}^\top {\mathbf {e}}_i = {\mathbf {e}}_i-{\mathbf {e}}_{\delta _{n+1}}\) and thus,
$$ \begin{array}{l} {\mathbf {h}}_{n+1} + {M_1^\top \cdots M_{{n+1}}^\top } {\mathbf {e}}_i - {\mathbf {e}}_i \\ \qquad = {\mathbf {h}}_{n+1} + {M_1^\top \cdots M_{n}^\top } {\mathbf {e}}_i - {M_1^\top \cdots M_{n}^\top } {\mathbf {e}}_{\delta _{n+1}} - {\mathbf {e}}_i \\ \qquad = \underbrace{{\mathbf {h}}_{n} + {M_1^\top \cdots M_{n}^\top } {\mathbf {e}}_i}_{\in B_{n}} - \underbrace{{M_1^\top \cdots M_{n+1}^\top } {\mathbf {e}}_{\delta _{n+1}}}_{= {\mathbf {t}}_{n+1}} + {\mathbf {t}}_{n+1}. \end{array} $$For the last equality, note that since \(M_{n+1}\) does not modify the \(\delta _{n+1}\)-th coordinate of \({\mathbf {v}}_n\), we have \(e_{\delta _{n+1}} = M_{n+1}^\top e_{\delta _{n+1}}\). \(\square \)
The second important result of the present work claims that the \(\mathbf {FSS}\) and \(\mathbf {FSB}\) GCF-algorithms construct an entire connected digital plane, using translations.
Theorem 4.3
Let \({\mathbf {v}}\in \mathbb {N}_+^3\), be a vector with relatively prime coordinates, let \(N={{{\mathrm{length}}}_{\mathbf {FSS}}({\mathbf {v}})}\) (resp. \({{{\mathrm{length}}}_{\mathbf {FSB}}({\mathbf {v}})}\)). For each \(n \in \{0,1,\dots ,N\}\), the set \(\left\{ \langle \mathbf {x}, {\mathbf {a}}_n \rangle \mid \mathbf {x} \in B_n \cup L_n \right\} \) is an integer interval.
The proof of Theorem 4.3 relies on a technical lemma, for which we define the following notation: given a finite set \(S \subset \mathbb {N}\), let \({{\mathrm{SUM}}}(S) = \sum _{s\in S} s\) be the sum of its elements and \({{\mathrm{PSUM}}}(S) = \{\sum _{x \in X} x \mid X \subseteq S\}\) be the set of its partial sums.
Lemma 4.4
Let \(x \in {\mathbb N}\) and \(S \subset {\mathbb N}\) be such that \({{\mathrm{PSUM}}}(S)\) is an integer interval. If \(x \leqslant {{\mathrm{SUM}}}(S)+1\), then \({{\mathrm{PSUM}}}(S\cup \{x\})\) is an integer interval.
Proof
Let \(a \in \{0,1,\dots ,{{\mathrm{SUM}}}(S)+x\}\). If \(a \leqslant {{\mathrm{SUM}}}(S)\), then \(a \in {{\mathrm{PSUM}}}(S) \subseteq {{\mathrm{PSUM}}}(S \cup \{x\} )\). Otherwise, \(0 \leqslant a-x \leqslant {{\mathrm{SUM}}}(S)\) and \(a-x \in {{\mathrm{PSUM}}}(S)\). \(\square \)
Proof
(of Theorem 4.3 – Sketch). The proof is given for \(\mathbf {FSS}\) algorithm, the case \(\mathbf {FSB}\) being similar. Let,
Hence \(\overline{\mathbb {T}}_{n,0} = \left\{ \mathbf {0} \right\} \) and its partial sums is an integer interval. Let us suppose that the partial sums of the set \(\overline{\mathbb {T}}_{n,k}\), for some \(k \in \{0,\dots ,n-1\}\), form an integer interval and let us show that the partial sums of the set \(\overline{\mathbb {T}}_{n,k+1}\) form an integer interval too, using
According to Lemma 4.4, it is sufficient to show:
Remind that \({\mathbf {a}}_n = {M_1^{-1} M_2^{-1} \cdots M_{n}^{-1}} \cdot {\mathbf {1}}\), or, equivalently, \({\mathbf {1}}= M_n \dots M_1 \cdot {\mathbf {a}}_n\). Let \({\mathbf {a}}_{n,0}={\mathbf {a}}_n\) and \({\mathbf {a}}_{n,i+1} = M_i \cdot {\mathbf {a}}_{n,i}\), with \(i \in \{0,\dots ,n-1\}\). The action of \(M_i\) consists in subtracting \(\langle {\mathbf {t}}_i, {\mathbf {a}}_n\rangle \) to at least one coordinate of \( {\mathbf {a}}_{n,i-1}\) to compute \( {\mathbf {a}}_{n,i}\), and \(\langle {\mathbf {t}}_i,{\mathbf {a}}_n \rangle \) is the minimal coordinate of \( {\mathbf {a}}_{n,i-1}\). Since \( {\mathbf {a}}_{n,n} = {\mathbf {1}}\), there exists a subset \(J \subseteq \{i+1,\dots ,n\}\) such that \(1= \langle {\mathbf {t}}_i,{\mathbf {a}}_n \rangle - \sum _{j \in J}{\langle {\mathbf {t}}_i,{\mathbf {a}}_n \rangle }\), that is:
Setting \(i = n-k-1\), condition (2) holds. \(\square \)
Now, it becomes natural to investigate the thickness of the digital plane generated.
Theorem 4.5
Let \({\mathbf {v}}\in \mathbb {N}_+^3\), be a vector with relatively prime coordinates, let \(\mathbf {X}\) be either \(\mathbf {FSS}\) or \(\mathbf {FSB}\) and let \(N = {{{\mathrm{length}}}_{\mathbf {X}}({\mathbf {v}})}\). The thickness is bounded:
Proof
The highest point of \(B_N\) is, by construction, \(h_N = {\mathbf {t}}_1 + {\mathbf {t}}_2 + \cdots + {\mathbf {t}}_N\). Also,
which is, by Property 3.1 (6), the sum of the values subtracted at each step of the execution of the algorithm.
Using the definition of the algorithms, Selmer and Brun subtract each time this value to exactly one coordinate. In such case, \(\Vert {\mathbf {v}}_n\Vert _1 = \Vert {\mathbf {v}}_{n-1}\Vert _1 - {{\overline{\mathbf {t}}}}_{n-1}\). For Fully Subtractive algorithm, one subtracts at each step the latter value to two different coordinates. In such case, \(\Vert {\mathbf {v}}_n\Vert _1 = \Vert {\mathbf {v}}_{n-1}\Vert _1-2{{\overline{\mathbf {t}}}}_{n-1}\).
This means that if every step of the reduction is Selmer or Brun, then \(\Vert {\mathbf {v}}\Vert _1 = 3 + \sum _{i = 1}^N {{\overline{\mathbf {t}}}}_i\). On the other hand, if the reduction only uses the Fully Subtractive matrices, then \(\Vert {\mathbf {v}}\Vert _1 = 3 + 2\sum _{i = 1}^N {{\overline{\mathbf {t}}}}_i\).
A mix of both Fully Subtractive and Selmer (resp. Brun) reductions returns a value that lies between the bounds for iterating only \(\mathbf {FS}\) or only \(\mathbf {S}\) (resp. \(\mathbf {B}\)). Finally, by Property 3.1 (7), and Lemma 4.1, the height of the points in \(L_N\) is exactly 1 more than the highest point in \(B_N\), showing the result. \(\square \)
Let us remind that according to Proposition 3.4, the set \(L_N\) provides linearly independent vectors allowing us to span the entire connected digital plane \(\mathcal {P}({\mathbf {v}},\omega )\), with \(\omega = \max \left\{ \langle \mathbf {x}, {\mathbf {v}}\rangle \mid \mathbf {x} \in B_N \cup L_N \right\} +1 < \Vert {\mathbf {v}}\Vert _1\).
5 Conclusion and Further Work
In the present paper, we have provided a process to construct connected digital planes with integer normal vectors. This process is guided by a GCF-algorithm which mixes the Fully Subtractive and Selmer (resp. Brun) GCF-algorithms. The result is an algorithm that recursively builds a digital plane for any rational normal vector. However, although the resulting digital plane is connected, it is not, in general, the thinnest one among the connected digital planes with the same normal vector. More precisely, the more the GCF-algorithm applies the Fully Subtractive reduction, the thinner the digital plane is. The GCF-algorithms \(\mathbf {FSS}\) and \(\mathbf {FSB}\) construct different patterns but we are not able to state that one is better than the other. As a future work, we want to identify more geometric properties of these patterns. Moreover, we hope that new GCF-algorithms will provide patterns with even more properties like the ability to tile a digital plane or to control the anisotropy of the patterns. These properties, among others, would be of interest for practical use in the context of image analysis.
References
Arnoux, P., Ito, S.: Pisot substitutions and Rauzy fractals. Bull. Belg. Math. Soc. Simon Stevin 8(2), 181–207 (2001)
Berstel, J., Lauve, A., Reutenauer, C., Saliola, F.V.: Combinatorics on Words: Christoffel Words and Repetitions in Words. CRM Monograph Series, vol. 27. AMS, Providence, RI (2009)
Berthé, V., Fernique, T.: Brun expansions of stepped surfaces. Discrete Math. 311(7), 521–543 (2011)
Berthé, V., Domenjoud, E., Jamet, D., Provençal, X.: Fully subtractive algorithm, tribonacci numeration and connectedness of discrete planes. Research Institute for Mathematical Sciences, Lecture note Kokyuroku Bessatu B46, pp. 159–174 (2014)
Berthé, V., Jamet, D., Jolivet, T., Provençal, X.: Critical connectedness of thin arithmetical discrete planes. In: Gonzalez-Diaz, R., Jimenez, M.-J., Medrano, B. (eds.) DGCI 2013. LNCS, vol. 7749, pp. 107–118. Springer, Heidelberg (2013)
Berthé, V., Jamet, D., Jolivet, T., Provençal, X.: Critical connectedness of thin arithmetical discrete planes (2013). http://arxiv.org/abs/1312.7820
Berthé, V., Labbé, S.: Uniformly balanced words with linear complexity and prescribed letter frequencies. In: WORDS, pp. 44–52 (2011)
Brimkov, V., Coeurjolly, D., Klette, R.: Digital planarity–a review. Discrete Appl. Math. 155(4), 468–495 (2007)
Domenjoud, E., Jamet, D., Toutant, J.-L.: On the connecting thickness of arithmetical discrete planes. In: Brlek, S., Reutenauer, C., Provençal, X. (eds.) DGCI 2009. LNCS, vol. 5810, pp. 362–372. Springer, Heidelberg (2009)
Domenjoud, E., Provençal, X., Vuillon, L.: Facet connectedness of discrete hyperplanes with zero intercept: the general case. In: Barcucci, E., Frosini, A., Rinaldi, S. (eds.) DGCI 2014. LNCS, vol. 8668, pp. 1–12. Springer, Heidelberg (2014)
Domenjoud, E., Vuillon, L.: Geometric palindromic closure. Uniform Distrib. Theory 7(2), 109–140 (2012)
Fernique, T.: Generation and recognition of digital planes using multi-dimensional continued fractions. Pattern Recogn. 42(10), 2229–2238 (2009)
Fokkink, R., Kraaikamp, C., Nakada, H.: On schweiger’s problems on fully subtractive algorithms. Isr. J. Math. 186(1), 285–296 (2011)
Jolivet, T.: Combinatorics of Pisot substitutions. Ph.D. thesis, Université Paris Diderot, University of Turku (2013)
Klette, R., Rosenfeld, A.: Digital straightness - a review. Discrete Appl. Math. 139(1–3), 197–230 (2004)
Labbé, S.: 3-dimensional continued fraction algorithms cheat sheets (2015). http://arxiv.org/abs/1511.08399
Labbé, S., Reutenauer, C.: A d-dimensional extension of christoffel words. Discrete Comput. Geom. 54(1), 152–181 (2015)
Schweiger, F.: Multidimensional Continued Fractions. Oxford Science Publications, Oxford University Press, Oxford (2000)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Jamet, D., Lafrenière, N., Provençal, X. (2016). Generation of Digital Planes Using Generalized Continued-Fractions Algorithms. In: Normand, N., Guédon, J., Autrusseau, F. (eds) Discrete Geometry for Computer Imagery. DGCI 2016. Lecture Notes in Computer Science(), vol 9647. Springer, Cham. https://doi.org/10.1007/978-3-319-32360-2_4
Download citation
DOI: https://doi.org/10.1007/978-3-319-32360-2_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-32359-6
Online ISBN: 978-3-319-32360-2
eBook Packages: Computer ScienceComputer Science (R0)
