
Abstract
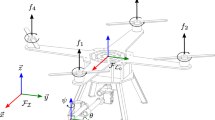
In this paper, we introduce a novel type of the multirotor aerial vehicle with two-dimensional multilinks which enables the stable aerial transformation for high mobility in three-dimensional environments. Our goal is to hold and carry object by using the whole-body manipulation in the air. The research involved three steps. First, we developed the modeling of the link modules that compose a multirotor with two-dimensional multilinks and conducted a quadrotor prototype. Second, we derived a stable flight control method for aerial transformation on the basis of linear-quadratic-integral optimal control. Third, we investigated the whole-body aerial manipulation based on the enveloping grasping method for the four-link type which takes the additional inertial parameters and joint torque into account. Successful aerial transformation and manipulation with the quadrotor prototype were demonstrated, confirming the feasibility of our proposed transformable multirotor for aerial maneuvering.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Kondak, K., Huber, F., Schwarzbach, M., Laiacker, M., Sommer, D., Bejar, M., Ollero, A.: Aerial manipulation robot composed of an autonomous helicopter and a 7 degrees of freedom industrial manipulator. In: 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 2107–2112, May 2014
Lippiello, V., Cacace, J., Santamaria-Navarro, A., Andrade-Cetto, J., Trujillo, M.A., Esteves, Y.R., Viguria, A.: Hybrid visual servoing with hierarchical task composition for aerial manipulation. IEEE Rob. Autom. Lett. 1(1), 259–266 (2016)
Mellinger, D., Lindsey, Q., Shomin, M., Kumar, V.: Design, modeling, estimation and control for aerial grasping and manipulation. In: 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2668–2673, September 2011
Michael, N., Fink, J., Kumar, V.: Cooperative manipulation and transportation with aerial robots. In: Proceedings of Robotics: Science and Systems, Seattle, USA, June 2009
Kawasaki, K., Motegi, Y., Zhao, M., Okada, K., Inaba, M.: Dual connected bi-copter with new wall trace locomotion feasibility that can fly at arbitrary tilt angle. In: 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 524–531, September 2015
Barkai, S., Rand, O., Peyran, R., Carlson, R.: Modeling and analysis of tilt-rotor aeromechanical phenomena. Math. Comput. Model. 27(12), 17–43 (1998)
Zhao, M., Kawasaki, K., Okada, K., Inaba, M.: Transformable multirotor with two-dimensional multilinks: modeling, control, and motion planning for aerial transformation. Adv. Rob. 30(13), 825–845 (2016)
Watanabe, T., Harada, K., Yoshikawa, T., Jiang, Z.: Towards whole arm manipulation by contact state transition. In: 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 5682–5687, October 2006
Reyes, F., Ma, S.: On planar grasping with snake robots: form-closure with enveloping grasps. In: 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 556–561, December 2014
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Zhao, M., Kawasaki, K., Chen, X., Kakiuchi, Y., Okada, K., Inaba, M. (2017). Transformable Multirotor with Two-Dimensional Multilinks: Modeling, Control, and Whole-Body Aerial Manipulation. In: Kulić, D., Nakamura, Y., Khatib, O., Venture, G. (eds) 2016 International Symposium on Experimental Robotics. ISER 2016. Springer Proceedings in Advanced Robotics, vol 1. Springer, Cham. https://doi.org/10.1007/978-3-319-50115-4_45
Download citation
DOI: https://doi.org/10.1007/978-3-319-50115-4_45
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-50114-7
Online ISBN: 978-3-319-50115-4
eBook Packages: EngineeringEngineering (R0)