
Abstract
This paper explores a new approach to the design and development of the future intelligent vehicle from the aspect of service innovation, by which the mobility service and intelligent vehicle could be integrated within the same context and objective. For this purpose, contexts, stages, stakeholders, and the types of data are used as the key elements to generate the service opportunity points. A four-dimension space constructed with these elements is adopted as an effective tool, which is helpful for considering the diversity and interactivity of the elements. Thus, 136 opportunity points are produced and used as the factors to define the vehicles. A theory from the Center of Automotive Research (CAR) is referenced to build the travelling model map. It describes nine travelling modes distributed in flexible/distance coordinates, and each of the modes is represented by an intelligent vehicle. The travelling model map is divided into nine sections by a three-by-three matrix, and the opportunity points are plotted into the corresponding section. In this way, a connection is established between opportunity points and the intelligent vehicles. Based on this theory, seven intelligent vehicles are endowed with respective characteristics and defined by services with similar properties. Finally, by studying the user journey of each service-defined intelligent vehicles (SDIVs) and analyzing the use case through the touchpoints/vehicles matrix, the features of SDIVs are furthered detailed and reflected by the interface design.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others



Keywords
1 Introduction
With the evolution of self-driving, vehicle-to-everything (V2X) technology, artificial intelligence, and other technologies, the development route of intelligent vehicles is becoming increasingly clear [1]. From 2013 to 2014, NHTSA and SAE released the automation level for vehicles. Then, automotive OEMs published their timetables of achieving autonomous vehicles. Most of these timetables are set as 2018 to 2020 [2].
Consequently, urban mobility is facing a series of innovation challenges: First, the occupancy volume of the house-holding car will be declined dramatically [3]. In addition, the transportation system will be highly flexible and self-organized. Meanwhile, on-demand service and end-to-end data sharing will be realized. Car-sharing and intelligent transportation system will significantly improve the efficiency and the user experience of urban mobility [4].
In this situation, vehicles no longer will be isolated but will become the key node and hybrid touchpoint [5] of new mobility services. Building new services to suit the urbanization of the future is an inevitable way to improve the quality and user experience of intelligent vehicles [6].
As new mobility services attract widespread concerns from both industry and academia. OEMs have different focusses: Volkswagen and BMW pay close attention to the consistency of different travelling scenarios. Specifically, Moia from Volkswagen offers connected commuting, ride-hailing, and moil next to meet different demands [7]. And BMW has released the new services of Drive Now, Park Now, and Charge Now [8]. In addition, Daimler and Toyota focus on smartphone-based mobility concepts. Daimler optimizes the use of existing transportation infrastructure and has developed flexible and eco-friendly mobility solutions, such as Car2go, moovel, and mytaxi [9]. Toyota launched Hamo as a solution to build an optimal connection between personal transportation modes and public transportation [10]. In addition, Ford focusses on providing more convenience for vehicle owners, and has released GoDrive as the first service to offer one-way trips with guaranteed parking [11]. Not only OEMs but also suppliers have embarked on these types of activities. For instance, SiMobility is a platform released by Siemens, which enables the incorporation of various service providers into a single-source portfolio for the user [12].
The research field has always focussed on the integration of public transportation means. In recent years, the main study direction has turned to the establishment of unified protocols and open platforms. Researchers have attempted to realize unified payment, billing, trip planning, and package subscription by mobile app. Grounded on this, many concepts are presented. First, a typical example is the Challenge of the Internet of Mobility to the Intelligent Transportation System [13]. The EU-funded project ‘Mobinet’ will be accomplished in July 2107. This project will build an open-service platform covering the whole of Europe, and will provide components and tools both for end users and service suppliers. Second, the so-called ‘integrated mobility’ concept intends to make progress from the aspect of a whole mobility life cycle. It aims to integrate information, planning, transport services, infrastructure, and traffic management as a single solution [14] (e.g., the IRMA developed by Pavia University). Similarly, seamless transportation is a concept which emphasizes the synergies and connections between different travelling types, infrastructures, and travel services [15] (e.g., the HS2 project in the UK). Furthermore, door-to-door mobility is another similar concept. It focusses on building services to improve travelling flexibility and reachability [16]. Maas is a concept that has emerged in recent years, first proposed in Finland by Sampo Hietanen [17] and promoted by Sonja Heikkila [18]. As defined by the Maas alliance, ‘Maas puts users, both travelers and goods, at the core of transport services, offering them tailor made mobility solutions based on their individual needs. The first Maas solution, Whim, has been released by MaaS Global [19].
Although a consensus is being reached that service will play a vital role in urban mobility, few people are concerned about how the intelligent vehicle adapts to and supports the service. In the industry field, vehicles and services are designed independently. Few design cases treat service and vehicle as an indivisible target (Leap is an exception [20]). In the beginning of production planning, most of the vehicle concepts do not take into account the demand for mobility service, especially the human-machine interaction and in-car infotainment system. Meanwhile, most of the services are designed for current vehicles rather than the future intelligent vehicle.
Therefore, from the perspective of the service-product system, this paper attempts to provide a new approach to the design and development of the intelligent vehicle within a service orientation. Specifically, there are four steps (Fig. 1). First, a four-dimension opportunity space is built, which is used as a tool for generating the service opportunity points (SOPs). Second, SOPs are generated and evaluated after two rounds of workshops. Each of them is matched with touchpoints and sorted into 14 categories. Third, the travelling model map with seven types of intelligent vehicles is set up. The map is divided into nine sections by a three-by-three matrix. Each opportunity point is plotted in the corresponding section. In this way, the SOPs get connected with seven types of intelligent vehicles. Fourth, based on the user journey mapping, the generality and individuality of SDIVs are discovered. In addition, generality and individuality are deconstructed by the touchpoints/vehicle matrix, the design requirements of the interfaces are defined.

The methodology of SDIV development
2 Exploring the Service Innovation Opportunities
2.1 Opportunity Space Construction
Contexts, stakeholders, and lifecycle stages are the key elements to a service [21]. In the development of automotive technology, these elements have gradually shown the properties of diversity, complexity, and interactivity.
In the near future, urban mobility will involve multiple contexts and will run through all the travelling stages based on the connected car and V2X technology. Furthermore, the stakeholders of the service will play multiple roles. Specifically, the owner of the vehicle can be the provider as well as the consumer of the service, and the consumer could choose to be a driver or a passenger on account of autonomous driving and manual driving. Moreover, with the development of the ‘vehicle as a sensor’ and big-data technology, data will become an input with important influence upon the service. Smart service based on data will be more intelligent and delivered more accurately.
These four elements will become the driver of new mobility development, and bring great opportunity for service innovation. For the purpose of discovering potential opportunities through service innovation, we construct a four-dimensional opportunity space (Fig. 2).

Four-dimensions opportunity space
Although the specific contents of each dimension were set based on preliminary research (Table 1), the contents are variable according to the design objective and strategy.
2.2 Opportunity Points Generation
Based on the theory of opportunity space, two workshops were organized to generate the service opportunity points (SOPs).
In the first workshop, eight team members were separated into four groups equally, with each group playing a specific role. In representing the demands of each role, participants brainstormed opportunities for service innovation. The brainstorming comprised six rounds in total, with each round directed at a particular travelling stage, which could be from ‘before the trip’ to ‘after the trip’.
During each round, the specific process was as follows:
-
(1)
A matrix with contexts and data types was built on the white board.
-
(2)
The host introduced the process and gave a demonstration.
-
(3)
The first round of brainstorming started from the travelling stage ‘before the trip’. With the help of the matrix, participants made written notes of all their ideas.
-
(4)
When the time limit was reached, each participant presented the ideas to other team members. Then they decided the correct position of the notes and whether some notes belonged to other stages.
-
(5)
Most of the notes were posted in the corresponding position, but some notes applied to the wrong stage and were held back for the correct stage.
-
(6)
After all of the notes had been posted on the white board, the participants supplemented the notes with new ideas in the sparse area after evaluating what kind of service could be provided by specific data in a specific travelling context.
-
(7)
Then the host organized the notes and took them off the board, except for those notes that applied to other stages.
-
(8)
The remaining stages were handled according to the same process.
-
(9)
In the end, all the notes were organized and the similar ideas were combined.
In this way, 324 SOPs were generated after six rounds of brainstorming.
In the second workshop, eight professionals with different backgrounds got together to vote on the results. Five indexes were provided for them as references: user benefit, commercial benefit, innovativeness, efficiency, and irreplaceability. Each index was weighted equally and used a scale of 0–5. The final score was subject to the average of all items (0 = negatively abandon, 1 = unworthiness, 2 = low value, 3 = medium value, 4 = high value, and 5 = a strong advocate). The statistical result indicated that 136 SOPs scored above the mean value 3.5, and they were divided into 14 categories: Recommendation, Local-based Service, Trip Planning, Analysis, Infotainments, Identity, Cockpit Ambience, Reminding, Goods Shipping, Parking, Contact, Maintenance, Payment, and Billing. Table 2 presents partial information from the 136 cases.
3 Defining the Intelligent Vehicles by Mobility Service
3.1 Plotting the SDIV
The SOPs mentioned above are not targeted but universal to most travelling modes. By referring to the different characteristic of travelling, they can be divided into clusters, and each cluster would support the travel under certain conditions. Additionally, the intelligent vehicles that support specific travelling also could be divided by the same reference. Therefore, a tool for describing the travel modes is required, which is helpful for exploring the connection between the SOPs and intelligent vehicles.
Thus the travelling model map is introduced based on the Center of Automotive Research (CAR) theory. ‘Which service is best for a given trip depends on trip distance and the amount of flexibility (time, destinations, availability) that the traveler has available for the trip’ [22]. Based on coordinates by flexibility and distance, CAR [23] describes nine types of New Mobility Service (NMS) modes in its report. This paper makes a few adjustments:
First, the CAR’s coordinates are divided by fuzzy intervals, which can provide a better reference to define in which part the services are located. The flexible axis is divided into three sections as ‘arbitrary’, ‘adaptive’, and ‘stable’. The distance axis is divided into three sections as ‘within 5 km’, ‘city center’, and ‘urban areas’. Thus, a 3 × 3 matrix covers the whole coordinates section.
Second, each NMS modes are represented by corresponding specific intelligent vehicles, and they were named as Carbot, Cario, Mycar, Minibus, UrbanTransit, Microtransit, and Microshuttle. Each of them fits a special niche (presented by different colours), but they also partially overlap with one another (Fig. 3).

Traveling model map
Each of the SOPs has a particular degree of sensitiveness and tendentiousness. Some are more sensitive to flexibility. For example, parking and route planning tend to be available under flexible travel. In contrast, trip planning and travel reminding tend to be applied in the inflexible modes, and route-based service is in the middle degree.
The other SOPs are more sensitive to distance. For example, in-vehicle entertainment and vehicle booking are more suitable to long distance, immediate vehicles-finding and spot guidance are more suitable to short-distance, and parking service is more likely for the midterm.
Based on this, the 136 SOPs were plotted on a flexibility/distance matrix (Fig. 4). To be adaptive to different parameters, some SOPs were plotted on a single grid while others were plotted in more than one grid. In addition, some universal SOPs, such as payment and evaluation, were plotted outside the region.

Plotting the SOPs
As a result of this exercise, it is easy to find the uneven density of the SOPs on the travelling model map. Thus the empty areas (such as the lower left corner) are regarded as innovative opportunity areas, another round of brainstorming was conducted as a supplement.
Finally, SOPs establish the relationship with the intelligent vehicle in the same grid. The larger the vehicle occupy the grid, the higher the priority for the corresponding SOPs. In this way, seven types of intelligent vehicles were defined.
3.2 SDIV Design Requirements Refinement
After the SDIV was defined, the design requirement for each vehicle could be further specified and clarified.
The previous SOPs were used as the material for SDIV user stories, which are helpful for finding out particular user journeys. For example, Fig. 5 describes a private car-sharing service based on myCar.

Storyboard of private car sharing
The user story mapping leads to the discovery of both generality and individuality of SDIVs. In summary, there are common touchpoints as well as different user actions. In addition, although different SDIVs are intended for different travelling purposes, they could be supported by a single platform and integrated by a single product-service system. Therefore, a touchpoints/vehicle matrix was built to deconstruct the user journey and produce the use cases (Table 3).
In this way, a framework based on four interfaces is set up. It includes the universal interface (Website, Owner App, and Hailing App) which supports all SDIVs, and the proper interface (Car HMI), which varies with the different SDIVs. The functions of these are as follows:
-
The website is the first touchpoint for understanding the product-service system, getting related information, signing up, etc. (Figure 6).
Fig. 6. 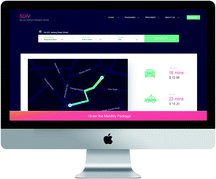
The layout of the Website
-
The Hailing App is for getting access to the service and managing the travel. Before the travel, people plan, book, and hail a vehicle through this app. After the travel, people pay, rate the service, and get a receipt (Fig. 7).
Fig. 7. 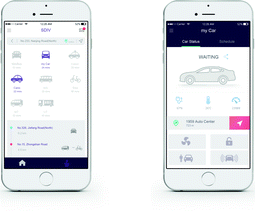
Mobile App UI design for consumer and vehicle owner
-
The Owner App supports vehicle owners in making travel plans, managing their vehicle, and publishing the sharing service (Fig. 7).
-
The In-Car HMI supports the service when the user is driving or riding, and should be designed in accordance with the specific vehicle (Fig. 8).
Fig. 8. 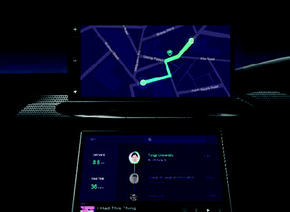
In-car dashboard UI design for Microbus



4 Conclusion
The SDIV is put forward based on the new situation of the automotive industry. It is a methodology for defining the service-oriented intelligent vehicle, as well as a new approach for product planning of intelligent vehicles.
Mobility innovation could be more effective and efficient under the guidance of this theory. Specifically, researchers could integrate the processes of product planning and service design, and make the output of the two parts more suitable. In service innovation, research could take into account more factors of future intelligent vehicles instead of conventional vehicles. In vehicle innovation, research could be more targeted and structured.
In addition, the SDIV is a multiple interactive way to inspire creativity. The factors such as the opportunity space and travelling model map are variable. Researchers could modify the factors according to technology development and business strategy, and try to approach discovery from multiple angles.
Finally, the SDIV draws the service-product system thinking into vehicle planning. Compared to the conventional vehicles, the SDIVs aims to improve the utilization of resources and promote the development of sustainability mobility. In this way, it could create greater business, social, and consumer value.
Although there are both scientific deductions and practical works in this paper, more research is required. Future work will face two main challenges: first, how to define more vehicle attributes based on service, for example, body styling and the cockpit user experience; and second, how to make the SDVI’s features respond rapidly to the changes in service demand. More experiments and simulation studies should be adopted to promote the SDIV in becoming an effective means of dealing with the complexity of future urban mobility.
References
Narla, S.R.K.: The evolution of connected vehicle technology: from smart drivers to smart cars to… self-driving cars. Inst. Transp. Eng. ITE J. 83(7), 22 (2013)
Litman, T.: Autonomous vehicle implementation predictions. Vic. Transp. Policy Inst. 28 (2014)
Schoettle, B., Sivak, M.: Potential impact of self-driving vehicles on household vehicle demand and usage (2015)
Schade, W., Krail, M., Kühn, A.: New mobility concepts: myth or emerging reality. In: 5th Conference-Transport Solutions: From Research to Deployment on Transport Research Arena-TRA 2014 (2014)
Lo, K.P.Y.: Hybrid touchpoints for relational service in social innovation: a case study of “Eat Me!” (2014)
Cornet, A., Mohr, D., et al.: Mobility of the future: opportunities for automotive OEMs. In: McKinsey Advanced Industries (2012)
MOIA. https://www.moia.io/
BMW Innovation. https://www.bmwgroup.com/en/innovation/technologies-and-mobility/mobility-services.html
Daimler Products. https://www.daimler.com/products/services/mobility-services/
Toyota Innovation. http://www.toyota-global.com/innovation/intelligent_transport_systems/hamo/
Noyer, U., Schlauch, T., Wissingh, B., et al:. MOBiNET: architecture and experience from a marketplace for mobility services. In: 11th ITS European Congress (2016)
Motta, G., Ferrara, A., Sacco, D., et al.: Integrated mobility: a research in progress. J. Softw. Eng. Appl. 6(3B), 97 (2013)
Preston, J.: Integration for seamless transport. In: International Transport Forum Discussion Papers, No. 2012/01. OECD Publishing (2012)
Stopka, U.: Identification of user requirements for mobile applications to support door-to-door mobility in public transport. In: Kurosu, M. (ed.) HCI 2014. LNCS, vol. 8512, pp. 513–524. Springer, Cham (2014). doi:10.1007/978-3-319-07227-2_49
Kamargianni, M., Li, W., Matyas, M., et al.: A critical review of new mobility services for urban transport. Transp. Res. Proc. 14, 3294–3303 (2016)
Heikkilä, S.: Mobility as a service-a proposal for action for the public administration, Case Helsinki (2014)
MaaS Global. https://maas.global/
Leap. http://rideleap.com/
Vasantha, G.V.A., Roy, R., Lelah, A., et al.: A review of product–service systems design methodologies. J. Eng. Des. 23(9), 635–659 (2012)
Kirby, R.F., Bhatt, K.V., Kemp, M.A., et al.: Paratransit: Neglected Options for Urban Mobility. Urban Institute, Washington, DC (1974)
Spulber, A., Dennis, E.P., et al.: The impact of new mobility services on the automotive industry. In: Center for Automotive Research (2016)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Zhou, B., Sun, X., Zhang, B. (2017). SDIV: Service-Defined Intelligent Vehicle Towards the 2020 Urban Mobility. In: Rau, PL. (eds) Cross-Cultural Design. CCD 2017. Lecture Notes in Computer Science(), vol 10281. Springer, Cham. https://doi.org/10.1007/978-3-319-57931-3_23
Download citation
DOI: https://doi.org/10.1007/978-3-319-57931-3_23
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-57930-6
Online ISBN: 978-3-319-57931-3
eBook Packages: Computer ScienceComputer Science (R0)