
Abstract
Nowadays a growing number of countries’ emergency management mechanisms are based on the network governance mechanism. The task group such as emergency support function (ESF) of the United States is the basic component of emergency response network. How to share function units among task groups is a basic problem of network structure design. This paper proposes a model to decompose transaction cost structure of cooperation between groups and evaluate different choices of sharing units between groups. Through applying this model to the case with only two groups, it shows the equilibrium solution to both sides could be obtained by a bottom-up method.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others
Keywords
- Transaction cost
- Network governance
- Emergency management
- Inter-organizational relationship
- Equilibrium analysis
1 Introduction
Task group is a national system often replicated by provinces and local governments in emergency governance of many countries. Governments use it to organize their agencies into groups. Each group focuses on some tightly related missions and groups can work together for some complex situations. However, how to form group programs seems significantly to depend on the personal experience of governmental officials. Even after the continual evolution of the system during many serious disasters, there are still very few studies on how to improve the design of task groups.
Emergency task groups take a key role in emergency network governance. The core idea of networked governance is that organizations are inter-dependent and should cooperate to achieve a commonly desirable goal [1]. Sharing organizations and resources between groups is a fundamental means to construct network. And it brings into groups various degrees of overlap.
According to the China official files on earthquake disaster emergency management (EDEM), in 2008 the overlap was fairly slight between the task groups at national level (Appendix 1: Table 1). In contrast, the overlap phenomenon of emergency support function (ESF) in the United States is much more obvious (Appendix 2:Table 2), where ESF corresponds to a task group. With 15 ESFs, National Response Framework 2008 introduced a mechanism of coordination from 47 federal agencies and the American Red Cross. The National Response Framework was updated twice in 2013 and 2016 and maintained the 2008 version of structure for task groups.
Overlap between task groups takes structural embeddedness beyond the market and hierarchy framework. It seems like a hybrid of them. Yet there is still no dedicated exploration what has happened during the groups which develop the overlap relationship.
Most related studies are carried out in the framework of network governance of emergency management. They use network-based theory to analyze the topics of disaster response, in order to get more understanding on emergency networks. Some examples include interactions among organizations and information infrastructure supporting such interactions [2], coordination clusters in the response network [3], the relationship between planned networks, actual network and perceived influenced structure [4], network characteristics of inter-organizational collaboration [5]. Those studies are based on actual data and reach very convincing conclusions. They also provide insights into the features of network structure in real world that provide inspiration to set up our model in this study.
This paper intends to use transaction cost as a tool to explain the discrepancy among different degrees of overlap. As an application of the analysis framework, it discusses the equilibrium state of a case with only two task types and two corresponding groups.
2 Task Structure, Shared Unit and Transaction Cost
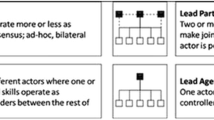
A task group could not just be regarded as some tightly related function units that often perform tasks together. What really decides the relationship between them is the task structure of emergency management. There are typically three types of role in certain kind of task: primary unit, support unit and coordinator unit. Task group completing a given task must include all primary units. Ownership of support units and coordinator units become the key issue of task group design.
Task group has some kinds of ownership of its function units. For units in the same task group, there is a complete set of mechanisms to improve efficiency, such as regular and interim meetings, reporting system, and positions for coordinator. And the emergency plans for units in one group are usually more detailed than those for groups. Besides, more often than not there are fund and authorization to help leaders unite the whole group.
Cross-group cooperation would bring transaction cost on synchronization between two or more parties. As all kinds of task need more than one unit, most missions have to be completed with the help from another group’s units. In a network governance mode, the parties usually have relatively equal status. As far as the core task group is concerned, it seems to “borrow” units from other groups and has to “pay” for such an arrangement.
It is not always true that internal cooperation takes less transaction cost than cross-group cooperation does. The transaction cost of internal cooperation is proportional to the scale of a group, since synchronization takes many activities such as planning, communicating, and negotiating. Considering that hierarchy is the basic structure of public departments, bureaucracy will be more serious in bigger groups. Some kinds of delay are inevitable.
Besides internal and external function unit, there is a third option, namely, shared unit. One unit could be the member of different groups at the same time. For the shared unit, transaction cost not only comes from internal cooperation, but also from the arrangement of confliction from all its parent groups. It must make adjustments to fit into different plans and commands. This kind of transaction cost should rise with growing number of shared units.
Fortunately, the transaction cost could decline as the groups sharing more units. Shared units could play the role of coordination channels to eliminate difference and improve mutual understanding. For these reasons, the overlap extent of task groups affects transaction cost at both the unit level and the group level, even there is no shared units taking part in current cross-group actions.
The final program on task group setting usually highly correlated with groups’ choice on transaction costs. In the emergency management, groups’ professional opinions are easier to receive attention. The final solution should to some extent reflect their common choices. Of course in most cases, common choice may not be the optimal choice for each one.
Despite so many factors affecting the formation of a task group, transaction costs should be the dominant one. A deeper understanding of the causality could assist the government to greatly improve.
3 Model, Optimum and Equilibrium Solution
Set \( \Theta _{i} \) contains all function units associated with task. There are two task group \( \Omega _{i} \subset\Theta _{i} \) and \( \Omega _{j} \subset\Theta _{j} \), \( \Theta _{i} \subset (\Omega _{i} \cup\Omega _{j} ) \). Let \( \rho_{ij} \) be the overlap rate between task group \( \Omega _{i} \) and \( \Omega _{j} \), where \( \rho_{ij} = \frac{{k_{ij} }}{{w_{i} }} \in [0,1] \), \( w_{i} = \left| {\Theta _{i} } \right| \), \( k_{ij} = \left| {\Omega _{i} \cap\Omega _{j} } \right| \). Here \( \left| {\Theta _{i} } \right| \) represents the number of elements in set \( \Theta _{i} \), and so for the others. Let \( G_{ij} = \left| {\Theta _{i} \cup\Theta _{j} } \right| \) represent the total number of units.
Figure 1 demonstrates an example of two task groups with a total of 5 function units. The top half of the figure shows the distribution of units among sets. The bottom half counts the parameter values based on the distribution.

An example of task groups and function units
As discussed above, the transaction cost could be improved by properly sharing function units with other groups. There are three types of transaction costs that should be considered.
-
1.
Cross-group cooperation cost,
where \( \alpha_{ij} \in (0,1] \) is the cost parameter of cross-group cooperation, and \( s_{ij} = \left| {\Omega _{i} -\Omega _{j} } \right| \). It is created by group \( \Omega _{i} \) when it works with some unshared units in set \( \Theta _{i} -\Omega _{i} \). The cooperation cost for each unit will drop as the two groups sharing more units.
Here \( 1 - \rho_{ij} \) represents the proportion of unshared units on all function units associated with task \( i \). Even though there are a part of unshared units located inside the task group \( \Omega _{j} \), the set \( \Theta _{i} -\Omega _{i} \), they cannot be taken as some channels of communication and coordination and thus cannot reduce the transaction cost like shared units.
-
2.
Internal adjustment cost,
where \( \beta_{ij} \in (0,1] \) is the cost parameter of internal adjustment. This formula contains two trends at the same time. One is shared units will take adjustment cost, because each shared unit has to adapt multiple leadership. The other is the average adjustment cost will fall with the rise of overlap rate.
-
3.
Internal cooperation cost
where \( \gamma_{i} \in (0,1] \) is the cost parameter of internal cooperation. Internal cooperation will require more effort when the group grows in size. The subscript \( i \) of \( \gamma_{i} \) means this type of cost has no relationship with \( \Omega _{j} \).
As transaction costs cannot be negative,
should be satisfied in order to keep \( M_{i} \ge 0 \).
The total transaction cost of Task group \( \Omega _{i} \) is calculated as
The \( TC_{i} \) can reach the minimum value when
Specific value of \( \rho_{ij}^{*} \) depends on the relative sizes of \( \alpha_{ij} \), \( \beta_{ij} \) and \( \gamma_{i} \). It shows that there is an optimal overlap rate for task group \( \Omega _{i} \) which minimizes the transaction cost.
Unfortunately, the overlap rate between groups is not a unilateral decision. For example, another task group \( \Omega _{j} \) can change \( k_{ij} \) and then \( s_{ij} \) by sharing some function units that belong to \( \Omega _{i} \) but still in \( \Theta _{j} \). We should find the equilibrium solution for both sides and make sure no one wants to take the initiative to change \( k_{ij} \).
In an equilibrium state, we can see some relationship between \( \Omega _{i} \) and \( \Omega _{j} \). The overlap rate, \( \varvec{ }\rho_{ij}^{*} \) and \( \rho_{ji}^{*} \) may not be equal but the shared function units should be the same. Then
where
The following condition should also be met when the two sets, \( \Theta _{i} \) and \( \Theta _{j} \), overlap with each other,
According to the Eqs. (6), (7), (8) and (9), the optimal solution of \( \rho_{ij}^{*} \), \( \rho_{ji}^{*} \), \( s_{ij}^{*} \) and \( s_{ji}^{*} \) can be obtained.
4 Discussion
Although this paper discusses a simple case of two task groups, we get some interesting and instructive findings. The most important one is the equilibrium state is closed. After we find the equilibrium state between \( \Omega _{i} \) and \( \Omega _{j} \), the question becomes that whether or not \( \Omega _{i} \) could get an equilibrium state with another task group, such as \( \Omega _{h} \), without breaking the equilibrium state with \( \Omega _{j} \).
In fact, the equilibrium state can only be broken by \( \Omega _{i} \) and \( \Omega _{j} \) themselves. Because the units shared with \( \Omega _{h} \) will only come from the set of \( \Theta _{i} \cap\Theta _{h} \), the choices of \( \Omega _{h} \) will not change parameters in the cost formulas between \( \Omega _{i} \) and \( \Omega _{j} \). And then the results of equilibrium will keep the same, such as \( s^{*} \) and \( \rho^{*} \). If \( \Omega _{i} \) or \( \Omega _{j} \) desires to establish equilibrium with \( \Omega _{h} \) and shares or gives up shared units belonging to \( \Theta _{i} \cap\Theta _{j} \cap\Theta _{h} \), then \( \rho_{ij}^{*} \), \( \rho_{ji}^{*} \), \( s_{ij}^{*} \) or \( s_{ji}^{*} \) will be changed. These variables should be adjusted to restart a new equilibrium state.
The main conclusion is that the balance can only be destroyed by parties in the relationship. With this strategy one task group could keep the lowest transaction cost with one group when it builds equilibrium with the other one. As long as the group can carefully enough avoid the units possibly shared by multiple parties, it is capable of setting up a new equilibrium without breaking the previously established one.
Another important find is the equilibrium solutions do exist. Given some basic information we could get the best solution for both sides. Actually there are only three choices for any given group.
-
1.
\( \rho^{*} = 0 \), there is not overlap with each other. Groups establish balance just by cross-group cooperation and internal cooperation;
-
2.
\( \rho^{ *} = 1 - \frac{s}{w} \), it takes all related units internal firstly and then let the overlap to be determined by equilibrium;
-
3.
\( \rho^{ *} = 1 - \frac{(\gamma - \beta )w + \alpha s}{{2(\upalpha -\upbeta)w}} \), it is some solution between the above two.
Last but not least, it is worth noting that the basic assumption maybe challenged in some cases. That is all the tasks are independent of each other. In real practices, the capacity of a task group is very limited. Some parameters, such as \( \alpha_{ij} \), \( \beta_{ij} \) and \( \gamma_{i} \), are difficult to maintain consistent when facing a growing number of tasks. And the final results will also suffer the impacts of parameter variations.
5 Conclusion
In this paper, the framework of transaction cost is used to analyze the mechanism of overlap phenomenon in emergency task groups. In order to reduce cost, task groups share units as an alternative to internalization and cross-group collaboration. It discloses micro-foundation of emergency network governance. The network structure is developed by disaggregating function units into three parts: unshared internal units, shared units and unshared external units. The third part is very important but is often neglected by existing studies.
We also use the bottom-up method to find the equilibrium overlap between groups. It is very useful in some scenarios that task groups need to change their composition to adapt to a dynamic environment. At first individual group finds the relationship between overlap rate and unshared units that could bring maximum transaction cost reduction. Then it could determine the parameters through building a balance relationship with the other group.
The future extensions of this study may come in two directions. First, a general model should be explored that could find the equilibrium solution for more than two task groups. As the interplay of groups’ choice, it is very difficult to build balance between multi-groups. Some kinds of iterative algorithms should be introduced here. The second one is to measure the three types of transaction costs from real data. All kinds of models based on transaction cost have to face the challenge of finding evidence from empirical study. Taking advantages from the growing development of information systems in emergency management, we may try to estimate the costs by communication data in these systems.
References
Provan, K.G., Fish, A., Sydow, J.: Interorganizational networks at the network level: a review of the empirical literature on whole networks. J. Manag. 33, 479–516 (2007). doi:10.1177/0149206307302554
Zhang, H., Zhang, X., Comfort, L., Chen, M.: The emergence of an adaptive response network: the April 20, 2013 Lushan, China Earthquake. Saf. Sci. 90, 14–23 (2016). doi:10.1016/j.ssci.2015.11.012
Noori, N.S., Paetzold, K., Vilasis-Cardona, X.: Network based discrete event analysis for coordination processes in crisis response operations. In: 2016 Annual IEEE on Systems Conference (SysCon) (2016). doi:10.1109/SYSCON.2016.7490603
Guo, X., Kapucu, N.: Network performance assessment for collaborative disaster response. Disaster Prev. Manag. 24, 201–220 (2014). doi:10.1177/0149206307302554
Wang, Y., Han, C., Liu, L.: Network analysis of the inter-organizational collaboration in emergency management system of China. In: 2013 IEEE International Conference on Systems, Man, and Cybernetics (2013). doi:10.1109/SMC.2013.220
The State Council of China: Notice of the composition of the earthquake relief headquarter task groups of State Council 关于国务院抗震救灾总指挥部工作组组成的通知 (2008). http://www.gov.cn/zhengce
The United States Department of Homeland Security. National Response Framework (NRF), Department of Homeland Security, Washington DC (2008)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendices
Appendix 1
Appendix 2
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Wang, Yf. (2017). A Transaction Cost Equilibrium Analysis on Overlap Between Emergency Response Task Groups. In: Nah, FH., Tan, CH. (eds) HCI in Business, Government and Organizations. Supporting Business. HCIBGO 2017. Lecture Notes in Computer Science(), vol 10294. Springer, Cham. https://doi.org/10.1007/978-3-319-58484-3_34
Download citation
DOI: https://doi.org/10.1007/978-3-319-58484-3_34
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-58483-6
Online ISBN: 978-3-319-58484-3
eBook Packages: Computer ScienceComputer Science (R0)