
Abstract
Humanoid robot is one of the best solution to interact and utilize in our life space. We focus on shuffling walk for humanoid robots. Shuffling walk is expected to have an advantage in moving around the narrow area with constrained posture. In this study, we describe the classification of the motion of the shuffling walk and propose new classification in synchronous non-parallel shuffling walk which focused on the load point of the sole of the robot.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
We expect humanoid robots to interact and collaborate on many tasks in daily life. In our life space, most of tasks are performed stably in a narrow space with constrained posture. For example, in a kitchen task, constrained postures such as turning in place, forward stooping, knee bending, and knee stretching are required for cooking, dishes washing or placing to cupboard in a narrow space. For another example, in an elder-care situation, forward stooping to lift up a patient from the bed, turning in place to make the patient sit in a chair, and knee bending to have the patient shoe is needed in a narrow space.
Many other situations of constrained posture movements for humanoid robots. There are many researches about a continuous stepping walk for the humanoid robot movement. However, it is not suitable to perform in a narrow area because the knees are hit to the wall and the stepping walk becomes out of control in the situation of knee bending or stretching. Therefore, we have been studying a shuffling walk for a possible solution.
2 Categorization of Shuffling Walk
The shuffling walk is generated by stepless and slipping soles. The shuffling walk is categorized in [1, 2] (Fig. 1).

-
(a)
Asynchronous shuffling walk
The asynchronous shuffling walk is generated by slipping one foot at a time (Fig. 1-(a)). It can take a long step. However, it is relatively unstable because the center of gravity needs to be shifted dynamically. Kojima [3] proposed a control method for this motion and demonstrated using a life-size humanoid robot.
-
(b)
Synchronous parallel feet shuffling walk
The synchronous shuffling walk is generated by slipping both feet simultaneously and parallel (Fig. 1-(b)). It is relatively slow and needs to be control weight distribution in each foot. Therefore, it is unstable because of same reason in asynchronous shuffling walk. This motion was studied in [1, 2, 4,5,6].
-
(c)
Synchronous non-parallel feet shuffling walk
The synchronous non-parallel feet shuffling walk is generated by slipping both feet simultaneously and non-parallel (Fig. 1-(c)). It is relatively stable because the change of the center of gravity during movement is relatively small than the previously described two methods. This motion was studied in [7, 8]. However, these studies do not mention the distribution of soles force. In this study, we first categorize this motion in focus on the load distribution of soles.
3 Categorization of Synchronous Non-parallel Feet Shuffling Walk
We categorized the synchronous non-parallel feet shuffling walk according to the load point and pressure gradient of soles. In a generally used rectangular foot sole shape, when loading to the sole corner and moving to the rightward, it is limited to only following four patterns; inner side, outer side, left side and right side (Fig. 2).

Classification of synchronous non-parallel shuffling focusing on the load point (rightward movement)
4 Motion Flow and Calculated Moving Distance
Figure 3 shows the motion flows of each categorized motion while moving rightward. In the case of move to another direction, the motion flow can be generated by the similar way. In each motion, moving distance in one step can be calculated in the following;

Motion flow in each load point (rightward movement, 1 step)
where \( {\text{L}}_{\text{depth}} \) is the depth length of sole of the robot and \( \uptheta_{\text{yaw}} \) is the rotation angle in vertical axis of foot.
5 System Overview
We used Robovie-X PRO (manufactured by Vstone Co., Ltd.) for the following experiments (Fig. 4). The robot has 19 degrees-of-freedom (DOF) (1 [DOF] in the head, 3 [DOF] in each arm, and 6 [DOF] in each leg), dimensions of 380 (height) × 180 (width) × 73 (depth) [mm], and a weight of 2 [kg], approximately. The size of foot sole is 72 (width) × 123 (depth) [mm], approximately. We used RobovieMaker2 to create robot motions (Fig. 5). We used LL Sensor (manufactured by Xiroku Inc.) for distributed pressure sensor. The sensor has 45 (width) × 37 (depth) measurement points in the dimensions of 540 (width) × 480 (depth) [mm] in 100 [Hz] (Fig. 6). By using the companion software, the distributed pressure can be measured as color map (Fig. 7).

Robovie-X Pro

RobovieMaker2

LL Sensor

Measured pressure using the companion software when the robot is standing on LL sensor (Color figure online)
6 Experiment and Result
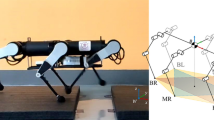
Each shuffling motion was generated by adjusting load points measured by the distribution pressure sensor so as to follow each pattern. The shuffle motion was started from the state where the robot was upstanding at the center of the distribution pressure sensor (Fig. 8). In our experiment, \( {\text{L}}_{\text{depth}} = 123\;[{\text{mm}}] \) and \( \uptheta_{\text{yaw}} = 5 \) [deg] was used. In this condition, the calculated travel distance is \( {\text{L}}_{\text{move}} = 21.4\;[{\text{mm/step]}} \).

Coordination system
In our pressure sensor, the measurement value varies depending on the conductivity of the target object and the material of the covering sheet. Figure 9 shows the result of measuring the color against the input pressure using the same material (aluminum) and size as the sole of the robot. Figure 10 shows the distribution pressure measured during each motion.

Pressure-color mapping of the distribution pressure sensor in following experiments (Color figure online)

Transition of distributed pressure in each load point while moving rightward (The first image is initial state, the next four images are first and second step, and the last image is final state.)
The movement trajectory was read from the coordinates of the center of gravity indicated by the measurement software. The measured trajectory is shown in Fig. 11. The travel distance and the angle of rotation are shown in Figs. 12 and 13 respectively.

Measured trajectory

Travel distance

Angle of rotation
As a result of the experiment, there was a big difference in trajectory, amount of movement and amount of rotation in each motion. In the pattern of inner load point (Fig. 3-(a)), it moved greatly to an unintended direction, and an unintended large rotation occurred. In the pattern of outer load point (Fig. 3-(b)), it also moved greatly to an unintended direction, but an unintended rotation was small. In the pattern of left load point (Fig. 3-(c)), it slightly moved to the intended direction, but unintended rotation was occurred. In the pattern of right load point (Fig. 3-(d)), it moves to the intended direction and no rotation occurs. However, the actual travel distance was 8.5 [mm] and it remained at 40% of the calculated travel distance. This loss is thought to be due to the slip on the floor.
7 Conclusion
In this paper, we proposed a classification focused on the load position of the sole on the synchronous non-parallel feet shuffling walk. When loading on the corner of the rectangular foot sole, it is only the four patterns of inner side, outer side, left side and right side. Uneven pressure distribution occurs on the soles of the feet due to the difference of these load positions, and the frictional force varies depending on places. Due to these effects, it seems that the experimental results showed a large difference in the traveling distance and the rotation angle. The right load point was the most desirable result with traveling distance and straightness.
For future works, we will model the dynamics of the sole and take into account the friction between the floor and the sole.
References
Koeda, M., Uda, Y., Sugiyama, S., Yoshikawa, T.: Shuffle turn and translation of humanoid robots. In: Proceedings of the 2011 IEEE International Conference on Robotics and Automation, pp. 593–598 (2011)
Koeda, M., Uda, Y., Sugiyama, S., Yoshikawa, T.: Side translation by simultaneous shuffle turn for humanoid robots. In: Proceedings of the 8th Asian Control Conference, pp. 1346–1351 (2011)
Kojima, K., Nozawa, S., Okada, K., Inaba, M.: Shuffle motion for humanoid robot by sole load distribution and foot force control. In: Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2187–2194 (2015)
Miura, K., Nakaoka, S., Morisawa, M., Kanehiro, F., Harada, K., Kajita, S.: A friction based “twirl” for biped robots. In: Proceedings of the 8th IEEE-RAS International Conference on Humanoid Robots, pp. 279–284 (2008)
Miura, K., Nakaoka, S., Morisawa, M., Kanehiro, F., Harada, K., Kajita, S.: Analysis on a friction based “twirl” for biped robots. In: Proceedings of the 2010 IEEE International Conference on Robotics and Automation, pp. 4249–4255 (2010)
Hashimoto, K., Yoshimura, Y., Kondo, H., Lim, H., Takanishi, A.: Realization of quick turn of biped humanoid robot by using slipping motion with both feet. In: Proceedings of the 2011 IEEE International Conference on Robotics and Automation, pp. 2041–2046 (2011)
Koeda, M., Murayama, R., Nishimura, M., Minato, I.: Analysis of shuffle traveling and verification by real humanoid. In: The 8th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment, and Management 2015 (2015)
Sugimoto, D., Koeda, M., Ueda, E.: ZMP-based shuffling walk control for humanoid robot. In: Proceedings of the 25th IEEE International Symposium on Robot and Human Interactive Communication, pp. 904–905 (2016)
Acknowledgement
This research was supported by Grants-in-Aid for Scientific Research (No. 15K00369) from the Ministry of Education, Culture, Sports, Science and Technology (MEXT), Japan.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Koeda, M., Sugimoto, D., Ueda, E. (2017). Classification of Synchronous Non-parallel Shuffling Walk for Humanoid Robot. In: Stephanidis, C. (eds) HCI International 2017 – Posters' Extended Abstracts. HCI 2017. Communications in Computer and Information Science, vol 714. Springer, Cham. https://doi.org/10.1007/978-3-319-58753-0_54
Download citation
DOI: https://doi.org/10.1007/978-3-319-58753-0_54
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-58752-3
Online ISBN: 978-3-319-58753-0
eBook Packages: Computer ScienceComputer Science (R0)