
Abstract
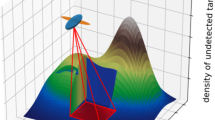
Mobile radio tomography applies moving agents that perform wireless signal strength measurements in order to reconstruct an image of objects inside an area of interest. We propose a toolchain to facilitate automated agent planning, data collection, and dynamic tomographic reconstruction. Preliminary experiments show that the approach is feasible and results in smooth images that clearly depict objects at the expected locations when using missions that sufficiently cover the area of interest.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Andersen, J.B., Rappaport, T.S., Yoshida, S.: Propagation measurements and models for wireless communications channels. IEEE Commun. Mag. 33, 42–49 (1995)
Bäck, T.: Evolutionary Algorithms in Theory and Practice: Evolution Strategies, Evolutionary Programming, Genetic Algorithms. Oxford University Press, Oxford (1996)
Björck, A.: Numerical Methods for Least Squares Problems. SIAM, Philadelphia (1996)
Bovik, A.C.: Handbook of Image and Video Processing. Academic Press, New York (2005)
Branke, J., Deb, K., Dierolf, H., Osswald, M.: Finding knees in multi-objective optimization. In: Yao, X., et al. (eds.) PPSN 2004. LNCS, vol. 3242, pp. 722–731. Springer, Heidelberg (2004). doi:10.1007/978-3-540-30217-9_73
Bredström, D., Rönnqvist, M.: Combined vehicle routing and scheduling with temporal precedence and synchronization constraints. Eur. J. Oper. Res. 191, 19–31 (2008)
De Wilde, B., ter Mors, A.W., Witteveen, C.: Push and rotate: Cooperative multi-agent path planning. In: Proceedings of the 2013 International Conference on Autonomous Agents and Multi-agent Systems, pp. 87–94. International Foundation for Autonomous Agents and Multiagent Systems (2013)
Emmerich, M., Beume, N., Naujoks, B.: An EMO algorithm using the hypervolume measure as selection criterion. In: Coello Coello, C.A., Hernández Aguirre, A., Zitzler, E. (eds.) EMO 2005. LNCS, vol. 3410, pp. 62–76. Springer, Heidelberg (2005). doi:10.1007/978-3-540-31880-4_5
Golden, B.L., Raghavan, S., Wasil, E.A.: The Vehicle Routing Problem: Latest Advances and New Challenges. Springer, Heidelberg (2008). doi:10.1007/978-0-387-77778-8
Helwerda, L.: Mobile radio tomography: Autonomous vehicle planning for dynamic sensor positions. Master’s thesis, LIACS, Universiteit Leiden (2016)
Menegatti, E., Zanella, A., Zilli, S., Zorzi, F., Pagello, E.: Range-only SLAM with a mobile robot and a wireless sensor networks. In: Proceedings of the 2009 IEEE International Conference on Robotics and Automation, pp. 8–14 (2009)
Sharon, G., Stern, R., Felner, A., Sturtevant, N.R.: Conflict-based search for optimal multi-agent pathfinding. Artif. Intell. 219, 40–66 (2015)
Standley, T.S.: Finding optimal solutions to cooperative pathfinding problems. In: Proceedings of the Twenty-Fourth AAAI Conference on Artificial Intelligence, pp. 173–178 (2010)
Van der Meij, T.: Mobile radio tomography: reconstructing and visualizing objects in wireless networks with dynamically positioned sensors. Master’s thesis, LIACS, Universiteit Leiden (2016)
Wilson, J., Patwari, N.: Radio tomographic imaging with wireless networks. IEEE Trans. Mob. Comput. 9, 621–632 (2010)
Wilson, J., Patwari, N., Guevara Vasquez, F.: Regularization methods for radio tomographic imaging. In: Virginia Tech Symposium on Wireless Personal Communications (2009)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Batenburg, K.J., Helwerda, L., Kosters, W.A., van der Meij, T. (2017). Mobile Radio Tomography: Agent-Based Imaging. In: Bosse, T., Bredeweg, B. (eds) BNAIC 2016: Artificial Intelligence. BNAIC 2016. Communications in Computer and Information Science, vol 765. Springer, Cham. https://doi.org/10.1007/978-3-319-67468-1_5
Download citation
DOI: https://doi.org/10.1007/978-3-319-67468-1_5
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-67467-4
Online ISBN: 978-3-319-67468-1
eBook Packages: Computer ScienceComputer Science (R0)