
Abstract
Automated steering maneuvers have the potential to further reduce collisions in automobile traffic. High torques on the steering wheel and steer-by-wire are two concepts to prevent unwanted interference by the human driver during such maneuvers. Yet both methods lack controllability required by regulations in case of a false alarm, which is required by regulations. This paper tackles the problem of controllability by structuring the process of overriding a maneuver. Six chronological elements are presented which open up new specific research areas each. Research so far is sorted into this process and possible future research is evaluated for each element.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others



Keywords
1 Introduction
Driver assistance systems are continuously improved and implemented in cars today. The ultimate goal is to reach a fully automated vehicle control system in which the driver becomes a mere passenger. The standard SAE J3016 [1] specifies to what extent an automated control system takes over the driving task from the human driver in a structure of levels. Up to level 3 – conditional automation, the human driver is still required as at least a fallback option if the system reaches certain system boundaries. With the introduction of level 4 – high automation and level 5 – full automation the system is able to overcome any critical scenario the vehicle might encounter.
Systems capable of solving any given scenario require use of nearly the full range of vehicle dynamics in a precise and fast manner. Studies report up to approx. 6 m/s2 in lateral acceleration [2]. Development of these systems permits to transfer parts of the functionality on SAE levels below 4.
Collision avoidance systems benefit most from fast longitudinal or lateral movements of the vehicle. Two concepts are established for collision avoidance: Emergency braking and emergency steering. Automated braking systems are already on the market today while automated steering systems that fully control the vehicles lateral motion are still under investigation. Automated evasive maneuvers can improve collision safety better than braking especially at higher speeds [3]. Research on automated steering first concentrated on technical feasibility and then moved on to inspect the human machine interface. Studies shifted towards the role of the driver in the event of an automated steering maneuver since regulations like [4, 5] still require the driver to be in charge of his vehicle at all times.
Early results for automated steering maneuvers are stated by [6] from the project “Proreta”. The authors successfully implemented an automated steering maneuver but report first signs of disrupting human interference. [7] also determine any human torque applied on the steering wheel as disturbance for the planned maneuver. [8] observed a reflex like behavior by human drivers at the onset of an automated steering maneuver which led the participants of their study to hold the steering wheel or even counter-steer. Similar results were found by [9] who measured 200–600 ms of initial damping of the steering wheel movement.
In the effort to improve automated steering systems, two methods to prevent any human interference were investigated in published studies: The first method proposes to apply a torque on the steering wheel that is too high for a human driver to control, i.e. [8,9,10]. The second method uses the concept of steer-by-wire, meaning the steering wheel is decoupled from the actual movement of the wheels on the street, rendering any human input ineffective, i.e. [10].
Despite the success of both methods in justified emergency cases, controllability remains a problem with both in case of a false activation [8,9,10,11]. ISO 17287 defines controllability at the “manner and degree to which drivers can influence TICS function and pace of interaction” [12]. No compromise has been found yet on how to prevent human interference for true positive cases while allowing the driver to overrule in a false positive case.
The described results in the literature expect the human interference, positive or negative, to execute and communicate different parts of an overruling intervention all with one single action, i.e. counter-steering. On the one hand reducing the required actions to a single one may reduce the workload and save valuable reaction time. Plus, choosing a steering input as overruling action may seem subjectively intuitive because it is the natural way of interacting with a vehicle. Yet on the other hand, results so far show that one single action combining all necessary information hasn’t been found yet. Consequently, this paper aims at unraveling the different parts of an overruling intervention by chronically structuring the process of controllability of an automated steering maneuver.
2 Process of Controlling an Automated Steering Maneuver
Figure 1 shows an approach of structuring the process of controlling an automated steering maneuver with six chronological elements. Relevant actions and points for communication are isolated as single elements in contrast to one combined action as used in the literature.

Proposed process of a human driver controlling an automated steering maneuver in case of a false alarm
-
1.
Communication of Systems Intent
An automated Steering Maneuver is initiated, once the automated control system deems it necessary based on the available information. At this moment the evasive maneuver is defined by aspects of time, i.e. time until maneuver starts, and aspects of space, i.e. direction of maneuver. All aspects which sufficiently describe the planned maneuver are summarized as intent of the automated system. Without any knowledge about an upcoming maneuver a human driver can’t react to or control the automated steering input. So the systems intent should be communicated to the human driver in the first step (Fig. 2).

Proposed process of a human driver controlling an automated steering maneuver in case of a false alarm with emphasis on the first element “Communication of Systems Intent”
Possibilities to inform the driver ahead of an automated steering maneuver are often labeled as warnings and divided into visual and acoustic warnings as well as haptic in the form of directional steering torques [13].
Acoustic signals used by [7] as well as [11] show tendencies to improve the overall success of automated steering maneuvers, yet no significant influence was found. [10, 11] used directional haptic tics to infer the following steering maneuver but also fall short of significant results. [14] argue for applying torque on the steering wheel as a form of warning, but add the possible danger of injury for the driver with this modality.
For future research [8] recommend to use improved acoustic warnings in the form of spoken word. The haptic modality could be preserved yet moved away from applying possibly dangerous torque by adding functionalities to a standard steering wheel. [15] present a version of haptic communication by installing a thin stretch of silicone on the front of the steering wheel which can be moved independently from the steering wheel rotation. Thereby [15] show that haptic communication of the systems intent can be realized on more detailed levels than steering wheel torque in future research.
[16] introduce a new modality that could hold potential for the communication of the systems intent. They present a system through which a roll motion of the vehicle can achieved independent from the vehicle dynamics. The method could make use of the vestibular sensory system by rolling the car in the direction of the intended maneuver. [16] also recommend future research for higher dynamics as is the case with emergency steering maneuvers.
Overall the communicated information should be expanded. Warnings used in studies so far only carry binary information whether a maneuver is imminent or not. Information about direction, duration or justification of the maneuver have not been communicated yet. Relevant aspects of the maneuver for the driver should be identified and the design of warnings adapted with respect to the required information to fully inform the driver about the systems intent.
-
2.
Drivers Analysis and Decision
The support of the human information processing is not exclusive to the topic of controllability and not the main concern of this paper. Appropriate information reception is accounted for with the mentioned modalities for communicating the intent of the system. The ways in which the human driver can express his reaction after processing the information is considered in the next element, communication of the drivers intent (Fig. 3).

Proposed process of a human driver controlling an automated steering maneuver in case of a false alarm with emphasis on the second element “Drivers Analysis and Decision”
-
3.
Communication of Drivers Intent
The drivers intent contains all relevant aspects about where and when the driver wants the vehicle to move. The driver can agree or disagree with the systems intent, yet research has shown that both options should be communicated to the system to improve its performance: The initial damping of the steering wheel movement costs valuable time since it is unclear whether a reflex or an intentional counter-steering occurred [8, 9]. This influences the systems ongoing behavior (Fig. 4).

Proposed process of a human driver controlling an automated steering maneuver in case of a false alarm with emphasis on the third element “Communication of Drivers Intent”
Most of the presented studies handled a steering input by the driver as a communication of his intent. Only [11] argue that counter-steering might not necessarily represent the drivers intent to overrule because some participants in their study steered even while unaware that an automated system took over control of the steering wheel and that they were no longer in a purely manual drive.
A different approach could be to introduce a new control element for the driver to explicitly communicate his intent without steering. A new control element has to meet certain requirements fitting the scenario, i.e. the short period of time available in a critical scenario. An example, which will be presented in a future publication, is installing a third pedal left to the brake pedal. This resembles the former clutch pedal from vehicles with manual transmission. Training for driving vehicles with manual transmission included stepping on the clutch pedal simultaneous to the brake pedal in case of an emergency. Whether drivers still automatically press both pedals if a third one is present or whether stepping on the left pedal requires a conscious decision will be investigated in future research.
-
4.
Systems Aborts Action
The automated system has to seize its actions and return to a state in which the human driver can safely access the pedals and the steering wheel, once the driver communicated his intent to overrule the system (Fig. 5).

Proposed process of a human driver controlling an automated steering maneuver in case of a false alarm with emphasis on the fourth element “Abort Systems Action”
The design of the systems retreat is only mentioned by [9] in the literature so far. The authors reduced the applied torque over a period of 250 ms to 0 Nm. The decline was fixed and applied for all participants in all scenarios.
We suggest two research questions that could benefit the abort of an automated steering maneuver:
-
1.
How should the decrease of torque be designed regarding duration until the torque is zero and shape or gradient of the decrease curve?
-
2.
What final state concerning the guidance of the vehicle should the abort of the automated maneuver lead to?
At a functional level the automated system should decrease the torque with respect to the actuators capabilities. The first proposed research question on the other hand considers the expected latter replacement action by the driver. A steep decrease potentially maximizes the drivers timeframe to execute his later replacement action because it shuts down the systems input the fastest (Fig. 6). Yet a following slower fade out of the automated torque might prevent the driver from accidentally overshooting his own replacing steering input due to the suddenly missing counter-torque (Fig. 7). Another option could be to insert a short break in the decrease, meaning the automated torque stops its decrease and remains at a certain level and continues to decrease after a short time. This could serve as a safety net in case there is a change in the drivers intent. If the drivers intent to abort the maneuver persists, the decrease could continue – in case the drivers intent changes and the automated maneuver should continue, the automated torque can rise to its original level faster than it would starting at zero (Fig. 8).

Linear decrease of torque (after [9])

Linear decrease of torque with a fade out

Linear decrease with intermediate level and possible increase as dashed line
The second suggested research question aims at not at the torque but at the steering wheel movement the driver is confronted with.
Three options could be possible:
-
1.
The automated torque is reduced to zero and without human interference the vehicle would continue to follow the path determined by the current steering wheel angle until the self-aligning torque sets the steering wheel angle back to approx. zero (Fig. 9).
Fig. 9. 
Digressive self-aligning torque on the steering wheel causing the steering wheel angle to slowly turn back to zero in case of an aborted automated steering input to the left
-
2.
The automated torque is changed in a way to return the steering wheel angle back to zero before it is shut off. This results in the vehicle continuing in a straight line if the driver doesn’t interfere (Fig. 10).
Fig. 10. 
Constant counter-torque applied by the automated system to quickly turn the steering wheel angle to zero after an aborted automated steering input to the left
-
3.
The automated torque is changed in a way that leads the vehicle back to its original path (Fig. 11).
Fig. 11. 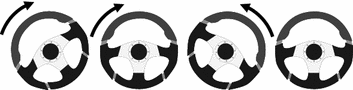
Constant counter-torque applied through the zero position to compensate the false steering maneuver and bring the vehicle back to the original trajectory after an aborted automated steering input to the left



The first option offers the least support for the driver, yet hands back control the fastest. The second option offers the driver a neutral starting position, yet probably has to apply automated torque longer to bring the steering wheel angle to zero. The third option might comply with the drivers intention to not swerve at all in case of a false alarm the most, yet it takes the longest before the automated torque is completely shut off. In conclusion the third option might lead to better results concerning the overruling in case of a false alarm since it already supports the drivers intention to not change the trajectory and should be tested in future research.
-
4.
Communication of Systems State
None of the published studies about automated steering maneuvers mention the communication of the state of the emergency steering system. [11] even report that some drivers were not aware of an ongoing automated maneuver. Clear communication of a successful shutdown of the automated maneuver might further decrease the risk of injuries as mentioned by [14]. A driver would only then put his hands back on the steering wheel when he has been informed that no further torque will be applied by the automated system. The same modalities as in the communication of the systems intent at the beginning of the process could be used to ensure consistency throughout the system (Fig. 12).

Proposed process a human driver controlling an automated steering maneuver in case of a false alarm with emphasis on the fifth element “Communication of Systems State”
Also not investigated yet is the potential of the decreasing torque from element four to serve as a modality to inform about the systems state. The reduction of the torque to zero mainly serves to guarantee an uninterrupted replacement action later. Adding torque to explicitly inform about the systems state might collide with the design of the torque on the functional level. It is also still subject to further research whether a driver perceives and understands the applied torque as implicit information about the systems state.
-
5.
Drivers Replacement Action
We suggest that a drivers intentional steering action is most effective when neither steer by wire nor high torques on the steering wheel are applied. This requires the system to be turned off completely by the time the driver starts his steering input. With respect to element four “Abort Systems Action”, the drivers replacement action can start with different preconditions in form of the current steering wheel angle or current position and orientation of the vehicle on the road (Fig. 13).

Proposed process of a human driver controlling an automated steering maneuver in case of a false alarm with emphasis on the sixth element “Drivers Replacement Action”
To summarize: The published studies about controllability of an automated steering maneuver don’t completely or at least partly fit the presented process above. [7, 10, 11] evaluate warnings ahead of a maneuver with limited content about the full intention of the system. The communication of the drivers intent and the replacement action of the driver are combined in one single step in all presented studies. Only [11] mentions that steering input not necessarily reflects the drivers intent. The design of the actual shut down of the automated maneuver has not been investigated in nearly all studies, with the exception of [9]. No study reported a feedback by the system regarding its state – still active or turned off.
In addition to the process modelled above, further research areas can be identified by crossing the different possible roles of the human driver and the automated system in case of an emergency steering maneuver. Table 1 shows the possible cases for the process of overruling with respect to the possible correct and incorrect actions by the human driver and the automated system. Three boxes are crossed out. These boxes represent cases that have an inconsistent logic, i.e. if a system already steers correctly by definition there can’t be a human intervention to make the maneuver even more correct. The remaining boxes are filled with a description of the expected outcome as well as references to studies where the corresponding case was investigated.
A driver intervention describes an action by the driver with consequences. A withheld driver intervention describes either a passive driver or an action by the driver with no consequences by design, i.e. steer by wire.
Table 1 shows where most experiments have been conducted yet and what other areas lack research so far. To the authors best knowledge, no study has been published yet reporting cases where the overruling of an automated maneuver caused an even more critical scenario. The two cases with steer correctly/withholds correctly and steers not correctly/withholds not correctly are represented by the studies by [10] where the method steer by wire was used.
3 Limitations and Conclusions
The presented process for controlling an automated steering maneuver offers six separated elements. Their appearance was structured in a chronical and linear way. Each element offers different research questions concerning its specific function in the process. Yet two important aspects have to be taken into consideration when experiments are underway to answer the proposed research questions:
-
1.
The interaction between two consecutive elements. As mentioned before the design of the communication of the systems intent influences the following analysis and decision of the driver. The communication of the drivers intent in return is dependent on the drivers decision. A longer information processing could lead to certain communication strategies to be eliminated since there is no more time to safely execute them. In the next step the chosen method to communicate the drivers intent might narrow down the possible strategies to abort the systems action. Lastly the driver has to adapt his replacement action depending on the process so far. A combination of steering and braking or even accelerating could be possible.
-
2.
The proposed process is modelled as linear. It doesn’t yet account for iterations that could occur after certain steps. If the system reverses its maneuver according to Fig. 11 it might communicate the original trajectory as new intent and the driver once again decides whether this fits his own intention.
In the beginning we pointed at the current development of automated steering systems in the context of automated vehicles. Yet the studies presented in this paper all investigated steering interventions during manual drives. Both driving modes come with at least one significantly different precondition: In automated driving the driver is allowed to take his hands off the steering wheel per definition [1]. The driver of i.e. a partly automated vehicle may not have his hands on the steering wheel at the beginning of a falsely initiated automated steering maneuver. This supports the development of alternative methods to communicate the drivers intent apart from counter-steering as discussed in element three.
Time is rare in critical scenarios in which automated steering maneuvers are initiated. [10] argued that the long reaction time of drivers was a major reason for the unsuccessful overruling of false automated maneuvers. In automated driving the driver has to put his hands back on the steering wheel in time for his replacing action. This time could be used to execute to abort of the systems action as discussed in element four if the driver communicated his intent to overrule before. In conclusion further research should use the reaction time, calculated by adding the individual times each element of the proposed process takes, as a metric to determine the efficiency of an investigated design.
References
SAE J3016: Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. http://standards.sae.org/j3016_201609/
Keller, C.G., Dang, T., Fritz, H., Joos, A., Rabe, C., Gavrila, D.M.: Active pedestrian safety by automatic braking and evasive steering. Trans. Intell. Transport. Sys. 12(4), 1292–1304 (2011). https://doi.org/10.1109/TITS.2011.2158424
Winner, H.: Grundlagen von Frontkollisionsschutzsystemen. In: Winner, H., Hakuli, S., Lotz, F., Singer, C. (eds.) Handbuch Fahrerassistenzsysteme. A, pp. 893–912. Springer, Wiesbaden (2015). https://doi.org/10.1007/978-3-658-05734-3_47
United Nations Economic Commission for Europe: Convention on Road Traffic, Version 1993 with Amendments in 2006. http://www.unece.org/fileadmin/DAM/trans/conventn/Conv_road_traffic_EN.pdf
Brockmann, M.: Code of Practice for the Design and Evaluation of ADAS (2009). http://www.acea.be/uploads/publications/20090831_Code_of_Practice_ADAS.pdf
Bender, E., Landau, K., Bruder, R.: Driver reactions in response to automatic obstacle avoiding manoeuvres. In: 16th World Congress on Ergonomics (IEA) (2006). http://tubiblio.ulb.tu-darmstadt.de/43003/
Sieber, M., Siedersberger, K.H., Siegel, A., Färber, B.: Automatic emergency steering with distracted drivers: effects of intervention design. In: IEEE 18th International Conference on Intelligent Transportation Systems, pp. 2040–2045 (2015). https://doi.org/10.1109/ITSC.2015.330
Fricke, N., Griesche, S., Schieben, A., Hesse, T., Baumann, M.: Driver behavior following an automatic steering intervention. Accid. Anal. Prev. 83(Supplement C), 190–196 (2015). https://doi.org/10.1016/j.aap.2015.07.018
Schneider, N., Purucker, C., Neukum, A.: Comparison of steering interventions in time-critical scenarios. Procedia Manuf. 3(Supplement C), 3107–3114 (2015). https://doi.org/10.1016/j.promfg.2015.07.858
Hesse, T., Schieben, A., Heesen, M., Dziennus, M., Griesche, S., Köster, F.: Interaction design for automation initiated steering manoeuvres for collision avoidance. In: 6. Tagung Fahrerassistenzsysteme, München (2013)
Schieben, A., Griesche, S., Hesse, T., Fricke, N., Baumann, M.: Evaluation of three different interaction designs for an automatic steering intervention. Transp. Res. Part F Traffic Psychol. Behav. 27, 238–251 (2014). https://doi.org/10.1016/j.trf.2014.06.002
ISO 17287: Road vehicles – Ergonomic aspects of transport information and control systems – procedure for assessing suitability for use while driving (2003)
Schneider, N., Berg, G., Paradies, S., Zahn, P., Huesmann, A., Neukum, A.: Designing emergency steering and evasion assist to enhance safety in use and controllability. In: Bengler, K., Drüke, J., Hoffmann, S., Manstetten, D., Neukum, A. (eds.) UR:BAN Human Factors in Traffic. A, pp. 479–494. Springer, Wiesbaden (2018). https://doi.org/10.1007/978-3-658-15418-9_28
Dang, T., Desens, J., Franke, U., Gavrila, D., Schäfers, L., Ziegler, W.: Steering and evasion assist. In: Eskandarian, A. (ed.) Handbook of Intelligent Vehicles, pp. 759–782. Springer, London (2012). https://doi.org/10.1007/978-0-85729-085-4_29
Ploch, C.J., Bae, J.H., Ju, W., Cutkosky, M.: Haptic skin stretch on a steering wheel for displaying preview information in autonomous cars. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 60–65 (2016). https://doi.org/10.1109/IROS.2016.7759035
Müller, C., Siedersberger, K.-H., Färber, B., Popp, M.: Aktive Aufbauneigung als Rückmeldekanal bei Querführungsassistenz über entkoppelte Lenkaktorik. Forschung im Ingenieurwesen 81(1), 41–55 (2017)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG, part of Springer Nature
About this paper

Cite this paper
Kalb, L., Bengler, K. (2018). Modelling the Process of Controlling an Automated Steering Maneuver. In: Duffy, V. (eds) Digital Human Modeling. Applications in Health, Safety, Ergonomics, and Risk Management. DHM 2018. Lecture Notes in Computer Science(), vol 10917. Springer, Cham. https://doi.org/10.1007/978-3-319-91397-1_48
Download citation
DOI: https://doi.org/10.1007/978-3-319-91397-1_48
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-91396-4
Online ISBN: 978-3-319-91397-1
eBook Packages: Computer ScienceComputer Science (R0)