
Abstract
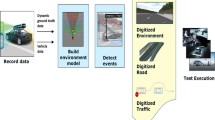
For the system test of automotive safety systems, thousands of kilometers need to be driven on real roads. In the future, that number will increase significantly through higher complexity of the functions. To reduce that number and guarantee the controllability, reproducibility and increase the flexibility, a high amount of virtual driving kilometers will be done in X-in-the-Loop (XiL) tests, simulating sensors, weather conditions, vehicle dynamics, car drivers, vulnerable road users, etc. Defining these driving scenarios manually is very complex, time consuming and can not be traced to test coverage conditions. This paper presents an approach to extract simulation based driving scenarios from state based test models. Through building a test model of the requirements and expending that with scenery and maneuver information of the driving tests, it is shown, that complete driving scenarios can be generated automatically to reach every possible state of the system under test.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Roehrleef, M., Deutsch, V., Ackermann, T.: Scenarios for autonomous vehicles - opportunities and risks for transport companies. In: Position Paper, November 2015, Verband Deutscher Verkehrsunternehmen e.V. (VDV), Cologne, Germany (2015)
Kalra, N., Paddock, S.M.: Driving to safety: how many miles of driving would it take to demonstrate autonomous vehicle reliability? RAND Corporation (2016). http://www.rand.org/content/dam/rand/pubs/research_reports/RR1400/RR1478/RAND_RR1478.pdf
Winner, H., Hakuli, S., Lotz, F., Singer, C. (eds.): Handbuch Fahrerassistenzsysteme: Grundlagen, Komponenten und Systeme für aktive Sicherheit und Komfort. ATZ/MTZ-Fachbuch, pp. 126–138. Springer, Wiesbaden (2015). https://doi.org/10.1007/978-3-658-05734-3
Bach, J., Otten, S., Sax, E.: Model based scenario specification for development and test of automated driving functions. In: IEEE Intelligent Vehicle Symposium (IV), Gothenburg, Sweden (2016)
Sahin Tas, O., Kuhnt, F., Zoellner, J.M., Stiller, C.: Functional system architectures towards fully automated driving. In: 2016 IEEE Intelligent Vehicles Sysmposium (IV), Gothenburg, Sweden (2016)
Yves, P., Fahrenkrog, F., Fiorentino, A., Gwehenberger, J., Helmer, T., Lindman, M., op den Camp, O., Rooij, L., Puch, S., Fränzle, M., Sander, U., Wimmer, P.: A comprehensive and harmonized method for assessing the effectiveness of advanced driver assistance systems by virtual simulation: the P.E.A.R.S. initiative. In: 24th International Technical Conference on the Enhanced Safety of Vehicles, Gothenburg, Sweden (2015)
Siavashi, F., Truscan, D.: Environment modeling in model-based testing: concepts, prospects and research challenges: a systematic literture review. In: EASE 2015 Proceedings of the 19th International Conference on Evaluation and Assessment in Software Engineering, New York, USA (2015)
Zofka, M.R., Kuhnt, F., Kohlhaas, R., Rist, C., Schamm, T., Zoeller, J.M.: Data-driven simulation and parametrization of traffic scenarios for the development of advanced driver assistance systems. In: 18th International Conference on Information Fusion, Washington, USA (2015)
Prialé Olivares, S., Rebernik, N., Eichberger, A., Stadlober, E.: Virtual stochastic testing of advanced driver assistance systems. In: Schulze, T., Müller, B., Meyer, G. (eds.) Advanced Microsystems for Automotive Applications 2015. LNM, pp. 25–35. Springer, Cham (2016). https://doi.org/10.1007/978-3-319-20855-8_3
Bringmann, E., Kraemer, A.: Model-based testing of automotive systems. In: 2008 International Conference on Software Testing, Verification and Validation, Lillehammer, Norway (2008)
Sattler, K.: Methodik fuer den Systemtest in der integralen Fahrzeugsicherheit. Dissertation, Otto-von-Guericke University Magdeburg, Germany (2015)
Riener, A., Wintersberger, Ph., Hempen, T., Lauerer, Ch., Hasirlioglu, S., Reway, F.: A flexible mixed reality test environment to improve simulation-based testing for highly automated driving. In: Aktive Sicherheit und Automatisiertes Fahren. Expert Verlag, Germany (2016)
Dirndorfer, T., Roth, E., von Neumann-Cosel, K., Weiss, Ch., Knoll, A.: Simulation environment for the development of predictive safety systems. In: Proceedings of the FISITA 2010 - World Automotive Congress, Budapest, Hungary (2010)
Acknowledgements
This work is supported under the funding program Forschung an Fachhochschulen of the German Federal Ministry of Education and Research (BMBF), contract number 13FH7I01IA (SAFIR).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 ICST Institute for Computer Sciences, Social Informatics and Telecommunications Engineering
About this paper

Cite this paper
Hempen, T., Biank, S., Huber, W., Diedrich, C. (2018). Model Based Generation of Driving Scenarios. In: Kováčiková, T., Buzna, Ľ., Pourhashem, G., Lugano, G., Cornet, Y., Lugano, N. (eds) Intelligent Transport Systems – From Research and Development to the Market Uptake. INTSYS 2017. Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering, vol 222. Springer, Cham. https://doi.org/10.1007/978-3-319-93710-6_17
Download citation
DOI: https://doi.org/10.1007/978-3-319-93710-6_17
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-93709-0
Online ISBN: 978-3-319-93710-6
eBook Packages: Computer ScienceComputer Science (R0)