
Abstract
In this paper, we are interested to present a variable exponent nonlocal p(x)-Laplacian model with weaker norm for image denoising. This model inherits the power of the variable exponent in reducing the execution time, besides, the benefit of using the weaker norm in the fidelity term more appropriate to represent textures and small details. At last, we present some numerical simulations and we compare the results with some existing models in the literature.
This work was supported by the PPR CNRST: Modèles Mathématiques appliqués à l’environnement, à l’imagerie médicale et aux Biosystèmes.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Image restoration problem, such as image denoising, is important interest in image processing. This problem aims to seek the restored image u(i) such that
where f(i) is a degraded image corrupted by the noise perturbation \(\xi (i)\) at a pixel i which often considered the stationary Gaussian with zero mean and variance \(\sigma ^2\). The main goal is to recover an image corrupted by the noise with preserving edges, fine details and small scale structures such as textures. To handle this problem, recently various of a nonlocal methods have been proposed for image denoising based on small sub-images, named patches that take into account the redundancy in natural images, particularly in textured parts. The nonlocal means proposed by Buades et al. [6] is the first to introduce this approach as a generalization of the Yaroslavsky filter [23] and patch based methods. Besides, the transform-based BM3D filter by Dabov et al. [9] is efficient at dealing with smooth regions and textures. It also relies both on nonlocal (patches) and local characteristics which is a combination of classical filtering techniques of natural images. Motivated by the definition of nonlocal operators by Zhou and Schölkopf on discrete graphs [24], Gilboa and Osher later formalized a systematical study, especially by introducing nonlocal operators [13, 14]. Meanwhile nonlocal PDEs on graphs [4, 5, 10,11,12] has stared to attract attention from mathematical, machine learning, image processing by proposing a regularization framework on weighted graphs with similar operators in the discrete setting. In the general setup of nonlocal variational problems, it is more appropriate to consider the minimization problem to seek the restored image  :
:

where J is the weight function, \(1< p < \infty \), \(\mu \) is a probability measure and \(\lambda \) is a fidelity parameter. Notice that the second integral  in the functional is the fidelity term, it encourages the solution u(x) that is being close enough to approximate the noisy image f(x). While the first integral in the energy E(u) is the nonlinear nonlocal regularization term. functional associated to \(\frac{1}{p}\int _{\varOmega }|\nabla u(x)|^p d\mu (x) \). In case \(H(t)=\frac{t^2}{2}\), Kindermann et al. [3, 18] have proposed and studied the nonlocal p-Laplacian problems for deblurring and denoising images, which can be written as:
in the functional is the fidelity term, it encourages the solution u(x) that is being close enough to approximate the noisy image f(x). While the first integral in the energy E(u) is the nonlinear nonlocal regularization term. functional associated to \(\frac{1}{p}\int _{\varOmega }|\nabla u(x)|^p d\mu (x) \). In case \(H(t)=\frac{t^2}{2}\), Kindermann et al. [3, 18] have proposed and studied the nonlocal p-Laplacian problems for deblurring and denoising images, which can be written as:

Recently, in [17], the authors proposed to combine the nonlocal p-Laplacian equation with the variable exponent [1, 8] that yields to use different diffusion types depending on each pixel in the image in oder to give a faster denoising process, which is written as follows:

In other hand, following up on Meyer’s ideas [19], many research [2, 15, 16, 21, 22] have showed the important role of the fidelity term. Furthermore, they came up with variants choices in the fidelity term by choosing weaker norms that helped for much better separation of the high frequency component of images, such as smaller details and texture.
The rest of this paper is structured as follows. In Sect. 2, we present the proposed model inspired and motived by the previous works. At last, Sect. 3 is devoted to numerical results and comparative experiments to improve our model.
2 Proposed Model
In the current work, our contribution is to use variants choices of function H in the fidelity term of the nonlocal p(x)-Laplacian model (3). Therefore, we set \(H(t)=\frac{t^q}{q}\) with \(1<q\le 2\) in order to choose a suitable fidelity term can have far reaching consequences as preserving textures and small details. The proposed model inherits the power of the variable exponent in reducing the execution time, besides, the benefit of the nonlocal approach and the weaker norm in preserving textures and small details which the minimization can be expressed as:

where \(K(x,y)=\frac{J(x,y)}{2p(x,y)}.\) Moreover, if u is the minimizer of the functional (4), then we have

Thus, we deduce that the minimization problem (4) is formally associated to Euler-Lagrange equation:

We deal with the following evolution problem (\(P_q\)) associated to the minimization (4):

with \(1<q\le 2\) and \(\displaystyle Q_T:= (0,T) \times \varOmega \).
3 Numerical Simulations
For the numerical experiments, we are interested to solve the evolution discrete problem which is associate with the continuous nonlocal problem (\(P_q\)). The following problem (\(P_q\)) is presented by taking the measure as the form \(\mu =\sum _{i \in Z^m} \delta _i\) where \(\delta _i\) is the dirac:
The function p is chosen as:
the Gaussian kernel \(\displaystyle G_a\) and the weight function are respectively given by:
where \(\displaystyle d(i,j)= \int _\varOmega G_a(z)|f(i+z)-f(j+z)|^2 dz\) is the distance between patches located at i and j, \(\rho \) is a positive constant which controls the similarity. The discrete iterative scheme of the problem (\(P_q\)) using the explicit Euler method is given by:
where \( \mathcal {N}_i\) is the neighbors set and \(\tau \) is the time step sizer, \(u_i\) be the value of a pixel i in the image and \(J_{i,j}\) is the discrete version of the function J(i, j).
Next we present the algorithm used to solve our proposed model.

For the numerical experiments, we set \(\lambda =0.05\), \(q=1.0001\) and the time step size \(\tau =0.5\). For computing the weight function, we choose a patches size of \(11\times 11\) (i.e. to the standard square window of size \(2P+1\) with \(P=5\)), a search window of \(21\times 21\) (i.e. to the standard square window of size \(2N_w+1\) with \(N_w = 10\)) and \(a=2\). To evaluate the quality of the restoration results of our model, we applied statistical measure:
-
The peak signal to noise ratio (PSNR) is used to measure the quality of the restoration results which is given as:
$$ \displaystyle \text{ PSNR }=10 \log _{10}\Big [\frac{255^2 M N}{||u_0-u||^2_2}\Big ]dB,$$where \(u_0\), u and \(M\times N\) are the original image, the restored image and the size of the image, respectively.
-
The signal–to–noise ratio (SNR) is applied to qualify the restoration capacity of the method under consideration, and denoted by:
$$ \displaystyle \text{ SNR }=\log _{10}\big [\frac{\sigma _u}{\sigma _n}\big ]dB,$$where \(\sigma _u\) and \(\sigma _n\) are the signal and noise standard deviations, respectively. In Fig. 1 our algorithm can denoise images contaminated by additive gaussian noise. Furthermore, the SNR and PSNR values of the noisy and restored images displayed in Table 1 confirm the performance of our model on denoising images.

First row: images corrupted by Gaussian noise with zero mean and variance \(\sigma =25\). Second row: restored images with the model (\(P_q\)).
To validate the ability of the model (\(P_q\)) to preserve the texture and small details, we compare the model (\(P_q\)) with the local Total variation with \(L^1\)-term fidelity (TVL1) studied by Chan and Esedoglu [7] and Nikolova [20] by choosing \(H(t)=t\). The Fig. 2 indicate that our method could raises the PSNR value compared with the local method. Then, we shall zoom the region containing the texture. Thus, the Fig. 3 confirm that our model is more robust than the local model in preserving texture and fine details.

Left: noisy Barbara image with \(PSNR = 26.5609\), middle: restored image by TV model with \(L^1\)-fidelity term with \(PSNR = 28.3769\) and right: restored image by our model with \(PSNR = 32.1088\).

Comparative experiment on zoomed region on Barbara image.
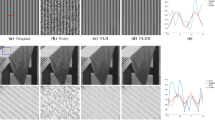
In the next experiment, we compare our model (\(P_q\)) with the nonlocal model with \(L^1\) in the fidelity term (NLL1) with \(H(t)=t\) in order to show the benefit of the exponent variable. We set an optimal value of PSNR as a stopping criteria (30.7654 for Barbara image) and we use the same parameters for both algorithms then we compare the results (cf. Fig. 4). After 110 iterations, our algorithm obtains the desired PSNR while the image resulting of the application of NLL1 is not yet denoised. The NLL1 model reaches the stopping criterion after 380 iterations (cf. Fig. 5). Besides, the execution time for NLL1 model is 164.5305 s while our algorithm takes only 48.7873 s. Table 2 shows that our algorithm takes less time to denoise different images compared to NLL1 model. Furthermore, we present the denoising error image which contains many less details (cf. Fig. 6). This proves the benefit of the variable exponent in regards to both computation time and quality.

Left: noisy image (PSNR = 24.6126), middle: restored image by NLL1 (PSNR = 27.5385) and right: restored image by our model (PSNR = 30.7654).

Left: noisy image (PSNR = 24.6126), middle: restored image by NLL1 (PSNR = 30.7654) and right: restored image by NLL1px (PSNR = 30.7654).

From left to right: NLL1 denoising result and error and our model denoising result and error.

Restored Barbara image using our algorithm and different q values.
In the last test, we compare the model (P) with variants choices of q values that correspond to different models which replace the fidelity term with weaker norms when q is close enough to 1. We choose the same parameters for this comparison. Figures 7 proves that in case where q is close to 1 gives a better results in removing noise as well much better separation of the high frequency component of images, such as smaller details and texture compared with the p-Laplacian equation with \(L^2\)-term (\(q = 2\)).
4 Conclusion
This paper describes a variable exponent nonlocal p(x)-Laplacian model with weaker norm for image denoising. The proposed model, which is based on introducing a weaker norm as well on exploitation of the variable exponent, removes noise, preserves edges, handles better repetitive structures and textures in a reduced time.
References
Aboulaich, R., Meskine, D., Souissi, A.: New diffusion models in image processing. Comput. Math. Appl. 56(4), 874–882 (2008)
Afraites, L., Atlas, A., Karami, F., Meskine, D.: Some class of parabolic systems applied to image processing. Discrete Contin. Dyn. Syst. Ser. B 21(6), 1671–1687 (2016)
Andreu, F., Mazón, J. M., Rossi, J. D., Toledo, J.: A nonlocal p-Laplacian evolution equation with non homogeneous Dirichlet boundary conditions. SIAM J. Math. Anal., 40(5):1815–1851, 2008/09
Bougleux, S., Elmoataz, A., Melkemi, M.: Discrete regularization on weighted graphs for image and mesh filtering. n 1st International Conference on Scale Space and Variational Methods in Computer Vision (SSVM), 4485 of Lecture Notes in Computer Science:128–139, (2007)
Bougleux, S., Elmoataz, A., Melkemi, M.: Local and nonlocal discrete regularization on weighted graphs for image and mesh processing. International Journal of Computer Vision 84(2), 220–236 (2009)
Buades, A., Coll, B., Morel, J.M.: A review of image denoising algorithms, with a new one. Multiscale Model. Simul. 4(2), 490–530 (2005)
Chan, T.F., Esedolu, S.: Aspects of total variation regularized \(L^1\) function approximation. SIAM J. Appl. Math. 65(5), 1817–1837 (2005)
Chen, Y., Levine, S., Rao, M.: Variable exponent, linear growth functionals in image restora- tion. SIAM J. Appl. Math. 66(4), 1383–1406 (2006)
Dabov, K., Foi, A., Katkovnik, V., Egiazarian, K.: Image denoising by sparse 3-D transform- domain collaborative filtering. IEEE Trans. Image Process. 16(8), 2080–2095 (2007)
Elmoataz, A., Lezoray, O., Bougleux, S.: Nonlocal discrete regularization on weighted graphs: a framework for image and manifold processing. IEEE Trans. Image Process. 17(7), 1047–1060 (2008)
Elmoataz, A., Xavier, D.: Lezoray, O: Non-local morphological pdes and p-laplacian equation on graphs with applications in image processing and machine learning. IEEE Journal of Selected Topics in Signal Processing 6, 764–779 (2012)
Elmoataz, A., Xavier, D., Zakaria, L., Olivier, L.: Nonlocal infinity Laplacian equation on graphs with applications in image processing and machine learning. Math. Comput. Simulation 102, 153–163 (2014)
Gilboa, G., Osher, S.: Nonlocal linear image regularization and supervised segmentation. Multiscale Model. Simul. 6(2), 595–630 (2007)
Gilboa, G., Osher, S.: Nonlocal operators with applications to image processing. Multiscale Model. Simul. 7(3), 1005–1028 (2008)
Guo, Z., Liu, Q., Sun, J., Wu, B.: Reaction-diffusion systems with \(p(x)\)-growth for image denoising. Nonlinear Anal. Real World Appl. 12(5), 2904–2918 (2011)
Guo, Z., Yin, J., Liu, Q.: On a reaction-diffusion system applied to image decomposition and restoration. Math. Comput. Modelling 53(5–6), 1336–1350 (2011)
Karami, F., Sadik, K., Ziad, L.: A variable exponent nonlocal p(x)-laplacian equation for image restoration. Computers and Mathematics with Applications 75, 534–546 (2018)
Kindermann, S., Osher, S., Jones, P.W.: Deblurring and denoising of images by nonlocal functionals. Multiscale Model. Simul. 4(4), 1091–1115 (2005)
Meyer, Y.: Oscillating patterns in image processing and nonlinear evolution equations, volume 22 of University Lecture Series. American Mathematical Society, Providence, RI, 2001. The fifteenth Dean Jacqueline B. Lewis memorial lectures
Nikolova, M.: Minimizers of cost-functions involving nonsmooth data-fidelity terms. Application to the processing of outliers. SIAM J. Numer. Anal. 40(3), 965–994 (2002)
Osher, S., Solé, A., Vese, L.: Image decomposition and restoration using total variation minimization and the \(H^{-1}\) norm. Multiscale Model. Simul. 1(3), 349–370 (2003)
Vese, L. A., Osher, S. J.: Modeling textures with total variation minimization and oscillating patterns in image processing. J. Sci. Comput., 19(1–3):553–572, 2003. Special issue in honor of the sixtieth birthday of Stanley Osher
Yaroslavsky, L. P.: Digital picture processing, volume 9 of Springer Series in Information Sciences. Springer-Verlag, Berlin, 1985. An introduction
Zhou, D., Schlkopf, B: Regularization on discrete spaces, in pattern recognition. Proceedings of the 27th DAGM Symposium, Berlin, Germany, pages 361–369, (2005)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG, part of Springer Nature
About this paper

Cite this paper
Karami, F., Meskine, D., Sadik, K. (2018). Variable Exponent Nonlocal Model with Weaker Norm in the Fidelity Term for Image Restoration. In: Mansouri, A., El Moataz, A., Nouboud, F., Mammass, D. (eds) Image and Signal Processing. ICISP 2018. Lecture Notes in Computer Science(), vol 10884. Springer, Cham. https://doi.org/10.1007/978-3-319-94211-7_43
Download citation
DOI: https://doi.org/10.1007/978-3-319-94211-7_43
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-94210-0
Online ISBN: 978-3-319-94211-7
eBook Packages: Computer ScienceComputer Science (R0)
