
Abstract
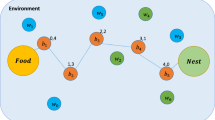
Keeping robots optimized for an environment can be computationally expensive, time consuming, and sometimes requires information unavailable to a robot swarm before it is assigned to a task. This paper proposes a hormone-inspired system to arbitrate the states of a foraging robot swarm. The goal of this system is to increase the energy efficiency of food collection by adapting the swarm to environmental factors during the task. These adaptations modify the amount of time the robots rest in a nest site and how likely they are to return to the nest site when avoiding an obstacle. These are both factors that previous studies have identified as having a significant effect on energy efficiency. This paper proposes that, when compared to an offline optimized system, there are a variety of environments in which the hormone system achieves an increased performance. This work shows that the use of a hormone arbitration system can extrapolate environmental features from stimuli and use these to adapt.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Bonani, M., et al.: The marxbot, a miniature mobile robot opening new perspectives for the collective-robotic research. In: 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 4187–4193. IEEE (2010)
Charbonneau, D., Dornhaus, A.: When doing nothing is something. How task allocation strategies compromise between flexibility, efficiency, and inactive agents. J. Bioecon. 17(3), 217–242 (2015)
Jin, Y., Guo, H., Meng, Y.: Robustness analysis and failure recovery of a bio-inspired self-organizing multi-robot system. In: 2009 Third IEEE International Conference on Self-Adaptive and Self-Organizing Systems. SASO 2009, pp. 154–164. IEEE (2009)
Kernbach, S., et al.: Symbiotic robot organisms: replicator and symbrion projects. In: Proceedings of the 8th Workshop on Performance Metrics for Intelligent Systems, pp. 62–69. ACM (2008)
Kuyucu, T., Tanev, I., Shimohara, K.: Hormone-inspired behaviour switching for the control of collective robotic organisms. Robotics 2(3), 165–184 (2013)
Lau, H.K.: Error detection in swarm robotics: a focus on adaptivity to dynamic environments. Ph.D. thesis, University of York (2012)
Liu, W., Winfield, A.F.T., Sa, J., Chen, J., Dou, L.: Towards energy optimization: emergent task allocation in a swarm of foraging robots. Adaptive behavior 15(3), 289–305 (2007)
Pinciroli, C., et al.: ARGoS: a modular, parallel, multi-engine simulator for multi-robot systems. Swarm Intell. 6(4), 271–295 (2012)
Robinson, S.: Simulation: the practice of model development and use. Wiley, Chichester (2004)
Şahin, E.: Swarm robotics: from sources of inspiration to domains of application. In: Şahin, E., Spears, W.M. (eds.) SR 2004. LNCS, vol. 3342, pp. 10–20. Springer, Heidelberg (2005). https://doi.org/10.1007/978-3-540-30552-1_2
Schroeder, A., Ramakrishnan, S., Kumar, M., Trease, B.: Efficient spatial coverage by a robot swarm based on an ant foraging model and the lévy distribution. Swarm Intell. 11(1), 39–69 (2017)
Shen, W., Lu, Y., Will, P.: Hormone-based control for self-reconfigurable robots. In: Proceedings of the Fourth International Conference on Autonomous Agents, pp. 1–8. ACM (2000)
Shen, W., Will, P., Galstyan, A., Chuong, C.M.: Hormone-inspired self-organization and distributed control of robotic swarms. Auton. Robots 17(1), 93–105 (2004)
Stradner, J., Hamann, H., Schmickl, T., Crailsheim, K.: Analysis and implementation of an artificial homeostatic hormone system: a first case study in robotic hardware. In: 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, October 2009
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG, part of Springer Nature
About this paper

Cite this paper
Wilson, J., Timmis, J., Tyrrell, A. (2018). A Hormone Arbitration System for Energy Efficient Foraging in Robot Swarms. In: Giuliani, M., Assaf, T., Giannaccini, M. (eds) Towards Autonomous Robotic Systems. TAROS 2018. Lecture Notes in Computer Science(), vol 10965. Springer, Cham. https://doi.org/10.1007/978-3-319-96728-8_26
Download citation
DOI: https://doi.org/10.1007/978-3-319-96728-8_26
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-96727-1
Online ISBN: 978-3-319-96728-8
eBook Packages: Computer ScienceComputer Science (R0)