
Abstract
Improving efficiency and productivity is an important factor in the development of robotic devices that can solve many human problems. Complex and monotonous actions that require precision and accuracy when moving large objects or performing technological processes can be carried out by redistributing part of the load on the robotic system. An example of such a system is an exoskeleton device. Active exoskeletons are referred to robotic human-machine systems. The interaction of operator and exoskeleton determines the quality of the functioning of such systems.
Practical purpose of research and development of active exoskeleton device for the human limbs is the reallocation of labor-intensive, monotonous activities on mechatronic system of exoskeleton.
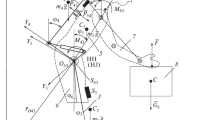
This paper discusses the dynamic model of interaction between exoskeleton system and operator.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Zhechev, M.M.: Equations of motion for singular systems of massed and massless bodies. J. Multibody Dynamics 221(K4), 591–597 (2007)
Pons, J.L.: Upper-limb robotic rehabilitation exoskeleton: tremor suppression. In: Kommu, S.S. (ed.) Rehabilitation Robotics, 648 p. Itech Education and Publishing, Vienna (2007)
Bergamasco, M.: An arm exoskeleton system for teleoperation and virtual environment applications. In: IEEE International Conference on Robotics and Automation, pp. 1449–1454 (1994)
Burdea, G.C.: Force and Touch Feedback for Virtual Reality. Wiley, New York, 368 p. (1996)
Park, H.S.: Developing a multi-joint upper limb exoskeleton robot for diagnosis, therapy and outcome evaluation in neurorehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 21(3), 490–499 (2013)
Thompson, R.L.: Integration of visual and haptic feedback for teleoperation. Ph.D. thesis, Trinity College Department of Engineering Science University of Oxford, 153 p. (2001)
Kazerooni, H.: Extenders: a case study for human-robot interaction via the transfer of power and information signals. In: Plenary Speaker at the 2nd IEEE International Workshop on Robot and Human Communication, Tokyo, Japan (1993)
Ishida, T.: Movement analysis of power-assistive machinery with high strength-amplification. In: Proceedings of SICE Annual Conference, pp. 2022–2025 (2010)
Acknowledgments
This study was partly supported by FASO Russia (Project No. AAAA-A17-117021310384-9).
This study was partly supported by the Program №.29 “Advanced Topics of Robotic Systems” (Project No. AAAA-A17-117121120021-9) of the Presidium of the Russian Academy of Sciences.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Switzerland AG
About this paper

Cite this paper
Gradetsky, V., Ermolov, I., Knyazkov, M., Semenov, E., Sukhanov, A. (2018). The Dynamic Model of Operator-Exoskeleton Interaction. In: Ronzhin, A., Rigoll, G., Meshcheryakov, R. (eds) Interactive Collaborative Robotics. ICR 2018. Lecture Notes in Computer Science(), vol 11097. Springer, Cham. https://doi.org/10.1007/978-3-319-99582-3_6
Download citation
DOI: https://doi.org/10.1007/978-3-319-99582-3_6
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-99581-6
Online ISBN: 978-3-319-99582-3
eBook Packages: Computer ScienceComputer Science (R0)