
Abstract
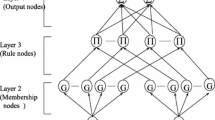
This paper presents an observer for robotic systems using FNN method to estimate the joint velocities of a robot, and then H ∞ approach is embedded to attenuate the effect of external distributes and parametric uncertainties of the robotic systems. Then a simulation example of 2-DOF robotic systems is given at last, from the simulation results, we can see the well performance of the designed observer and the estimation errors of the joint velocities are negligible.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
Zhi, L., Chunwen, L.: Fuzzy Neural Networks Quadratic Stabilization Output Feedback Control for Biped Robots via H∞ Approach. IEEE Transactions on System, Man and Cybernetics- PART B: Cybernetics 33, 67–84 (2003)
Han, L., Ding, L., Yanxi, Y., Xin, J.: Robot Manipulator Controller Based on Fuzzy Neural and CMAC Network. In: Proceedings of the Second International Conference on Machine Learning and Cybernetics, Xi An, China, pp. 525–529 (2003)
Nganga-Kouya, D., Saad, M., Lamarche, L.: Backstepping Passivity Adaptive Position Control for Robotic Manipulators. In: Proceeding of the American Control Conference, AK, pp. 4607–4611 (2002)
Minpeng, L., Pengyung, W.: Neural-Fuzzy Control System for Robotic Manipulators. IEEE Control Systems Magazine, 53–63 (2002)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2004 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Wang, Hb., Jiang, Cd., Wang, Hr. (2004). Fuzzy Neural Networks Observer for Robotic Manipulators Based on H ∞ Approach. In: Yin, FL., Wang, J., Guo, C. (eds) Advances in Neural Networks - ISNN 2004. ISNN 2004. Lecture Notes in Computer Science, vol 3174. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-540-28648-6_4
Download citation
DOI: https://doi.org/10.1007/978-3-540-28648-6_4
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-22843-1
Online ISBN: 978-3-540-28648-6
eBook Packages: Springer Book Archive