
Abstract
The number of robots in operation in the German-speaking orthopaedic community more than doubled last year, reflecting considerable excitement among patients and doctors over the prospects of improving the accuracy of endoprosthesis surgery in both the planning and implantation stages. The purported improvement, however, adds considerable expense to the procedures although little data exist still in many applications to prove its efficacy.
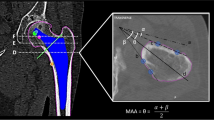
The following study compares pre- and post-operative radiographs of conventionally- and robotically-prepared groups of donor femurs implanted with an anatomic hip stem to quantify their respective preservation of three anatomic parameters– leg length, anterior bow angle, and mediolateral offset. All femurs were planned blindly both with virtual fitting using 3D reconstruction from CT scans and with conventional templates.
Maintenance of leg length as well as anterior bow angle were significantly higher (p<0.05) for the robotically-prepared group than for the manually-prepared group. Maintenance of mediolateral offset, however, was significantly higher for the manually-prepared group, likely due to the common varus implantation experienced with this prosthesis type. Further studies will examine microradiographic slices in the transverse plane to quantify the gap size resulting from the two methods.
Chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
References
Hefti, J.L., Epitaux, M., Glauser, D., Fankhauser, H.: Robotic three-dimensional positioning of a stimulation electrode in the brain. Comput. Aided Surg. 3(1), 1–10 (1998)
Mettler, L., Ibrahim, M., Jonat, M.: One year experience working with the aid of a robotic assistant in gynaecological endoscopic surgery. Hum Reprod 13(10), 2748–2750 (1998)
Okada, S., Tanaba, Y., Kimura, K., Yamaguchi, H., Sato, S.: Thoracoscopic surgery using voice controlled robot for spontaneous pneumothorax. Kyobu Geka 51(7), 561–563 (1998)
Nolte, L.P., Visarius, H., Arm, E., Langlotz, F., Schwarzenbach, O., Zamorano, L.: Computer-aided fixation of spinal implants. J. Image Guid Surg. 1(2), 88–93 (1995)
Jerosch, J., von Hasselbach, C., Filler, T., Peuker, E., Rahgozar, M., Lahmer, A.: Increasing the quality of preoperative planning and intraoperative application of computer-assisted systems and surgical robots -an experimental stud. Chirurg 69(9), 973–976 (1998)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2000 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Gossé, F., Wenger, K.H., Knabe, K., Wirth, C.J. (2000). Efficacy of Robot-Assisted Hip Stem Implantation. A Radiographic Comparison of Matched-Pair Femurs Prepared Manually and with the Robodoc® System Using an Anatomic Prosthesis. In: Delp, S.L., DiGoia, A.M., Jaramaz, B. (eds) Medical Image Computing and Computer-Assisted Intervention – MICCAI 2000. MICCAI 2000. Lecture Notes in Computer Science, vol 1935. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-540-40899-4_125
Download citation
DOI: https://doi.org/10.1007/978-3-540-40899-4_125
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-41189-5
Online ISBN: 978-3-540-40899-4
eBook Packages: Springer Book Archive