
Abstract
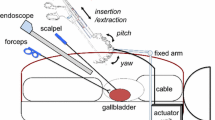
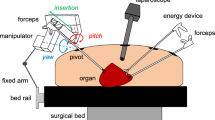
Many problems in laparoscopic surgery are due to the poor degrees of freedom of movement (DOF) in controlling forceps and laparoscopes. The Multi-DOF forceps manipulator we have newly developed has two additional DOF of bending on the tip of forceps, and provides new surgical fields and techniques for surgeons. The most remarkable characteristics of the prototype described in this paper are: 1) the small diameter (∅ 6 mm) and the small radius of curvature of bending; 2) the large force generated on each bending and grasping axis; 3) the confirmation of perfect cleanness and sterilization of this manipulator. The effectiveness of these characteristics was confirmed in actual testing by surgeons. This manipulator can solve problems met with in laparoscopic surgery, and will establish new standards for laparoscopic surgery with higher effectiveness and safety.
Chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
References
Rininsland, H.: ARTEMIS. A telemanipulator for cardiac surgery. European Journal of Cardio-Thoracic Surgery 16(2), 106–111 (1999)
Shennib, H., Bastawisy, A., McLoughlin, J., Moll, F.: Robotic computer-assisted telemanipulation enhances coronary artery bypass. Journal of Thoracic & Cardiovascular Surgery 117(2), 310–313 (1999)
Cohn, M., Crawford, L.S., Wendlandt, J.M., Sastry, S.S.: Surgical Applications of Milli-Robots. Journal of Robotic Systems 12(6), 401–416 (1995)
Charles, S., Das, H., Ohm, T., Boswell, C., Rodriguez, G., Steele, R., Istrate, D.: Dexterity-enhanced Telerobotic Microsurgery. In: Proceedings of 8th International Conference on Advanced Robotics (ICAR 1997), pp. 5–10 (1997)
Ikuta, K., Kato, T., Nagata, S.: Micro active forceps with optical fiber scope for intra-ocular microsurgery. In: Proceedings of the IEEE Micro Electro Mechanical Systems (MEMS), pp. 456–461 (1996)
Gupta, V., Reddy, N.P., Batur, P.: Forces in Laparoscopic Surgical Tools. Presence 6(2), 218–228 (1997)
Kobayashi, E., et al.: Development of a laparoscope manipulator using five-bar linkage mechanism. In: CAR 1997 Computer Assisted Radiology and Surgery - Proceeding of the 11th International Congress and Exhibition, pp. 825–830 (1997)
Nakamura, R., et al.: Development of forceps manipulator system for laparoscopic surgery. In: CARS 2000 Computer Assisted Radiology and Surgery - Proceeding of the 14th International Congress and Exhibition, pp. 105–110 (2000)
Hashimoto, D.: Gasless Laparoscopic Surgery. World Scientific Publishing, Singapore (1995)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2000 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Nakamura, R. et al. (2000). Multi-DOF Forceps Manipulator System for Laparoscopic Surgery. In: Delp, S.L., DiGoia, A.M., Jaramaz, B. (eds) Medical Image Computing and Computer-Assisted Intervention – MICCAI 2000. MICCAI 2000. Lecture Notes in Computer Science, vol 1935. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-540-40899-4_67
Download citation
DOI: https://doi.org/10.1007/978-3-540-40899-4_67
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-41189-5
Online ISBN: 978-3-540-40899-4
eBook Packages: Springer Book Archive