
Abstract
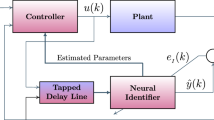
A general purpose neuro-adaptive controller, which realizes an indirect-adaptive control strategy, is introduced. The proposed algorithm is based on the use of two Multi-Layer feed-forward Perceptron (MLP) Neural Networks (NNs), which are trained using a momentum back-propagation (MBP) algorithm. One of the MLP NNs is used to identify the process. The other MLP NN is used to generate the control signal based on the data provided by the NN identifier. Training is done on-line to tune the parameters of the neuro-identifier and neuro-controller that provides the control signal. Pre-learning is not required and the structure of the overall system is very simple and straightforward, no additional controller or adaptive signal is needed. Tracking performance is guaranteed via Lyapunov stability analysis, so that both tracking error and neural network weights remain bounded. An interesting fact about the proposed approach is that it does not require a NN being capable of globally reconstructing the nonlinear model.
Several simulation examples are reported to demonstrate the merits of the proposed algorithm. As is shown in the simulations, the developed control algorithm can deal with different types of challenges that might happen in real-time applications, including the change of the reference model and the effect of applied unknown disturbances. The application of the proposed neuro-control algorithm to the adaptive control of electro-mechanical systems subject to stick-slip friction is shown in the last section of this paper. Reported simulations reveal that the proposed algorithm is able to eliminate the effect of this nonlinear phenomenon on the performance of the system.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
Dupont, P.E.: Avoiding stick-slip through PD control. IEEE Trans. Automatic Contr. 39, 1094–1097 (1994)
Leonard, N.E., Krishnaprasad, P.: Adaptive friction compensation for bi-directional low velocity position tracking. In: Proc. 31st CDC, Tucson, AZ, pp. 267–273 (1992)
Friedland, B., Park, Y.J.: On adaptive friction compensation. IEEE Trans. Automatic Contr. 40, 419–425 (1992)
Li, W., Cheng, X.: Adaptive high-precision control of positioning tables-Theory and experiments. IEEE Trans. Contr. Syst. Technol. 2, 265–270 (1994)
Tan, K.K., Lim, S.Y., Lee, T.H., Huang, S.N.: Adaptive control of DC permanent magnet linear motor for ultra-precision applications. In: Int. Conf. Mechatronic Tech., Taiwan, R.O.C., pp. 243–246 (1998)
De Wit, C.C., Lischinsky, P.: Adaptive friction compensation with partially known dynamic friction model. Int. J. Adapt. Contr. Sig. Process. 11(1), 65–80 (1997)
Otten, G., de Vries, T.J.A., van Amerongen, J., Rankers, A.M., Gaal, E.W.: Linear motor motion control using a learning forward controller. IEEE/ASME Trans. Mechatronics 2(3), 179–187 (1997)
Southward, S.C., Radcliffe, C.J., MacCluer, C.R.: Robust nonlinear stick-slip friction compensation. ASME J. Dyn. Syst., Meas., and Contr. 113, 639–645 (1991)
Lee, S.-W., Kim, J.-H.: Robust adaptive stick-slip friction compensation. IEEE Trans. Industrial Elec. 42(5) (1995)
De Wit, C.C., Olsson, H., Astrom, K., Lischinsky, P.: A new model for control of systems with friction. IEEE Trans. Automatic Contr. 40, 419–425 (1995)
Panteley, E., Ortega, R., Gafvert, M.: An adaptive friction compensator for global tracking in robot manipulators. Syst. Contr. Lett. 33, 307–313 (1998)
Huang, S.N., Tan, K.K., Lee, T.H.: Adaptive friction compensation using neural network approximations. IEEE Trans. Syst., Man and Cyber.-C 30(4), 551–557 (2000)
Baruch, I., Beltran, R.L., Olivares, J.-L., Garrido, R.: A Fuzzy-Neural Multi-Model for Mechanical Systems Identification and Control. In: Monroy, R., Arroyo-Figueroa, G., Sucar, L.E., Sossa, H. (eds.) MICAI 2004. LNCS (LNAI), vol. 2972, pp. 774–783. Springer, Heidelberg (2004)
Suraneni, S., Kar, I.N., Bhatt, R.K.P.: Adaptive stick-slip friction compensation using dynamic fuzzy logic system. In: Proc. TENCON 2003, the conference on convergent Technologies for Asia-Pacific Region, vol. 4, pp. 1470–1474 (2003)
Baruch, I., Garrido, R., Mitev, A., Nenkova, B.: A neural network approach for stick-slip model identification. In: Proc. of the 5th Int. Conf. on Engineering Applications of Neural Networks, EANN 1999, Warsaw, Poland, pp. 183–188 (1999)
Cohen, M.A., Grossberg, S.: Absolute stability of global pattern formation and parallel memory storage by competitive neural networks. IEEE Trans. on Systems, Man, and Cybernetics 13(5), 815–825 (1993)
Hopfield, J.J.: Neural networks and physical systems with emergent collective computational abilities. Proc. of the National Academy of Sciences, USA 79, 2554–2558 (1982)
Kosko, B.: Structural stability of unsupervised learning in feedback neural networks. IEEE Trans. on Automatic Control 36(7), 785–792 (1991)
Guez, A., Protopopsecu, V., Barhen, J.: On the stability, storage capacity and design of non-linear continuos neural networks. IEEE Trans. on Systems, Man, and Cybernetics 18(1), 80–87 (1988)
Kelly, D.G.: Stability in contractive non-linear neural networks. IEEE Trans. on Biomedical Eng. 37(3), 231–242 (1990)
Vidyasagar, M.: Location and stability of the high gain equilibria of non-linear neural networks. IEEE Trans. on Neural Networks 4(4), 660–672 (1993)
Jim, L., Nikiforuk, P.N., Gupta, M.M.: Absolute stability conditions for discrete-time recurrent neural networks. IEEE Trans. on Neural Networks 5(6), 954–964 (1994)
Tzirkel-Hancock, E., Fallside, F.: A stability based neural network control method for a class of non-linear systems. In: Proc. Inter. Joint Conf. on Neural Networks, vol. 2, pp. 1047–1052 (1991)
Lewis, F.L., Yesildirek, A., Liu, K.: Neural net robot controller with guaranteed stability. In: Proc. 3rd Inter. Conf. on Indus. Fuzz. Cont., pp. 103–108 (1993)
Lewis, F.L., Yesildirek, A., Liu, K.: Multilayer neural net robot controller with guaranteed tracking performance. IEEE Trans. on Neural Networks 7(2), 388–399 (1996)
Kwan, C., Lewis, F.L., Dawson, D.M.: Robust neural-network control of rigid-link electrically driven robots. IEEE Trans. on Neural Networks 9(4), 581–588 (1998)
Kuntanapreeda, S., Fullmer, R.R.: A training rule which guaranteed finite region stability for a class of closed-loop neural network control system. IEEE Trans. on Neural Networks 7(3), 629–642 (1996)
Park, S., Park, C.H.: Comments on a training rule which guarantees finite-region stability for a class of closed-loop neural-network control systems. IEEE Trans. on Neural Networks 8(5), 1217–1218 (1997)
Sadegh, N.: A perceptron network for functional identification and control of non-linear systems. IEEE Trans. on Neural Networks 4(6), 982–988 (1993)
Polycarpou, M.M.: Stable adaptive neural control scheme for non-linear systems. IEEE Trans. Auto. Control 41(3), 447–451 (1996)
Chen, F.-C., Khalil, H.K.: Adaptive control of non-linear systems using neural networks. Int. J. Control 55, 1299–1317 (1992)
Chen, F.-C., Khalil, H.K.: Adaptive control of a class of Non-linear Discrete-Time Systems Using Neural Networks. IEEE Trans. Auto. Control 40(5), 791–801 (1995)
Chen, F.-C., Liu, C.-C.: Adaptively controlling non-linear continuous-time systems using multilayer neural networks. IEEE Trans. Auto. Control 39(6), 1306–1310 (1994)
Fabri, S., Kadirkamanathan, V.: Dynamic structure neural networks for stable adaptive control of non-linear systems. IEEE Trans. on Neural Networks 7(5), 1151–1167 (1996)
Sun, F., Sun, Z., Woo, P.-Y.: Stable neural-network-based adaptive control for sampled-data non-linear systems. IEEE Trans. on Neural Networks 9(5), 956–968 (1998)
Jagannathan, S., Lewis, F.L.: Multilayer discrete-time neural-net controller with guaranteed performance. IEEE Trans. on Neural Networks 7(1), 107–130 (1996)
Jagannathan, S., Lewis, F.L., Pasravanu, O.: Discrete-time model reference adaptive control of nonlinear dynamical systems using neural networks. Int. J. Contr. 64(2), 217–239 (1996)
Suykens, J.A.K., Vandewalle, J.: Global asymptotic stability for multilayer recurrent neural networks with application to modelling and control. In: Proc. Inter. Conf. on Neural Network., vol. 2, pp. 1065–1069 (1995)
Narendra, K.S., Parthasarathy, K.: Identification and control of dynamical systems using neural networks. IEEE Trans. on Neural Net. 1(1), 4–27 (1990)
Mehrabian, A.R., Menhaj, M.B.: A real-time neuro-adaptive controller with guaranteed stability. Applied Soft Comput. J. 8(1), 530–542 (2008)
Hagan, M.T., Menhaj, M.: Training feedforward networks with the Marquardt algorithm. IEEE Trans. on Neural Net. 5(6), 989–993 (1994)
Sinha, N.K., Rao, G.P.: Identification of Continuous-time Systems: Methodology and Computer Implementation. Kluwer Academic, Dordrecht (1991)
Hornik, K.M., Stinchcombe, M., White, H.: Multilayer feedforward networks are universal approximators. Neural Net. 2(5), 359–366 (1989)
Hagan, M., Demuth, H., Beale, M.: Neural Network Design. PWS Publishing, Boston (1996)
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2010 Springer-Verlag Berlin Heidelberg
About this chapter
Cite this chapter
Mehrabian, A.R., Menhaj, M.B. (2010). Stick-Slip Friction Compensation Using a General Purpose Neuro-Adaptive Controller with Guaranteed Stability. In: Schumann, J., Liu, Y. (eds) Applications of Neural Networks in High Assurance Systems. Studies in Computational Intelligence, vol 268. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-10690-3_9
Download citation
DOI: https://doi.org/10.1007/978-3-642-10690-3_9
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-10689-7
Online ISBN: 978-3-642-10690-3
eBook Packages: EngineeringEngineering (R0)