
Abstract
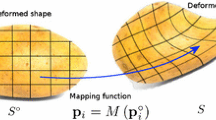
We present different approaches to reconstructing an inextensible surface from point correspondences between an input image and a template image representing a flat reference shape from a fronto-parallel point of view. We first propose a ‘point-wise’ method, i.e. a method that only retrieves the 3D positions of the point correspondences. This method is formulated as a second-order cone program and it handles inaccuracies in the point measurements. It relies on the fact that the Euclidean distance between two 3D points must be shorter than their geodesic distance (which can easily be computed from the template image). We then present an approach that reconstructs a smooth 3D surface based on Free-Form Deformations. The surface is represented as a smooth map from the template image space to the 3D space. Our idea is to say that the 2D-3D map must be everywhere a local isometry. This induces conditions on the Jacobian matrix of the map which are included in a least-squares minimization problem.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
Salzmann, M., Fua, P.: Reconstructing sharply folding surfaces: A convex formulation. In: IEEE Conference on Computer Vision and Pattern Recognition, pp. 1054–1061 (2009)
Shen, S., Shi, W., Liu, Y.: Monocular 3-D tracking of inextensible deformable surfaces under L 2-norm. IEEE Transactions on Image Processing 19, 512–521 (2010)
Perriollat, M., Hartley, R., Bartoli, A.: Monocular template-based reconstruction of inextensible surfaces. International Journal of Computer Vision (2010)
Bregler, C., Hertzmann, A., Biermann, H.: Recovering non-rigid 3D shape from image streams. In: IEEE Conference on Computer Vision and Pattern Recognition, pp. 2690–2696 (2000)
Bartoli, A., Gay-Bellile, V., Castellani, U., Peyras, J., Olsen, S., Sayd, P.: Coarse-to-fine low-rank structure-from-motion. In: IEEE Conference on Computer Vision and Pattern Recognition (2008)
Brand, M.: A direct method for 3D factorization of nonrigid motion observed in 2D. In: IEEE Conference on Computer Vision and Pattern Recognition (2005)
Del Bue, A.: A factorization approach to structure from motion with shape priors. In: IEEE Conference on Computer Vision and Pattern Recognition (2008)
Olsen, S., Bartoli, A.: Implicit non-rigid structure-from-motion with priors. Journal of Mathematical Imaging and Vision 31, 233–244 (2008)
Torresani, L., Hertzmann, A., Bregler, C.: Nonrigid structure-from-motion: Estimating shape and motion with hierarchical priors. IEEE Transactions on Pattern Analysis and Machine Intelligence 30, 878–892 (2008)
Xiao, J., Chai, J., Kanade, T.: A closed-form solution to non-rigid shape and motion recovery. International Journal of Computer Vision 67, 233–246 (2006)
Gay-Bellile, V., Perriollat, M., Bartoli, A., Sayd, P.: Image registration by combining thin-plate splines with a 3D morphable model. In: International Conference on Image Processing (2006)
Salzmann, M., Hartley, R., Fua, P.: Convex optimization for deformable surface 3-D tracking. In: IEEE International Conference on Computer Vision (2007)
Salzmann, M., Urtasun, R., Fua, P.: Local deformation models for monocular 3D shape recovery. In: IEEE Conference on Computer Vision and Pattern Recognition (2008)
Gumerov, N., Zandifar, A., Duraiswami, R., Davis, L.S.: Structure of applicable surfaces from single views. In: Pajdla, T., Matas, J(G.) (eds.) ECCV 2004. LNCS, vol. 3023, pp. 482–496. Springer, Heidelberg (2004)
Prasad, M., Zisserman, A., Fitzgibbon, A.W.: Single view reconstruction of curved surfaces. In: IEEE Conference on Computer Vision and Pattern Recognition, vol. 2, pp. 1345–1354 (2006)
Salzmann, M., Moreno-Noguer, F., Lepetit, V., Fua, P.: Closed-form solution to non-rigid 3D surface registration. In: Forsyth, D., Torr, P., Zisserman, A. (eds.) ECCV 2008, Part IV. LNCS, vol. 5305, pp. 581–594. Springer, Heidelberg (2008)
Shen, S., Shi, W., Liu, Y.: Monocular template-based tracking of inextensible deformable surfaces under l 2-norm. In: Zha, H., Taniguchi, R.-i., Maybank, S. (eds.) ACCV 2009. LNCS, vol. 5995, pp. 214–223. Springer, Heidelberg (2010)
Rueckert, D., Sonoda, L., Hayes, C., Hill, D., Leach, M., Hawkes, D.: Nonrigid registration using free-form deformations: Application to breast MR images. IEEE Transactions on Medical Imaging 18, 712–721 (1999)
Boyd, S., Vandenberghe, L.: Convex Optimization. Cambridge University Press, Cambridge (2004)
Zhu, J., Hoi, S., Lyu, M.: Nonrigid shape recovery by gaussian process regression. In: IEEE Conference on Computer Vision and Pattern Recognition (2009)
Dierckx, P.: Curve and Surface Fitting with Splines. Oxford University Press, Oxford (1993)
Perriollat, M., Bartoli, A.: A quasi-minimal model for paper-like surfaces. In: Proceedings of the ISPRS International Workshop Towards Benmarking Automated Calibration, Orientation, and Surface Reconstruction from Images (2007)
Perriollat, M., Hartley, R., Bartoli, A.: Monocular template-based reconstruction of inextensible surfaces. In: British Machine Vision Conference (2008)
Gray, A.: The Gaussian and Mean Curvatures. In: Modern Differential Geometry of Curves and Surfaces with Mathematica, pp. 373–380. CRC Press, Boca Raton (1997)
Gay-Bellile, V., Bartoli, A., Sayd, P.: Direct estimation of non-rigid registrations with image-based self-occlusion reasoning. IEEE Transactions on Pattern Analysis and Machine Intelligence 32, 87–104 (2008)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2011 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Brunet, F., Hartley, R., Bartoli, A., Navab, N., Malgouyres, R. (2011). Monocular Template-Based Reconstruction of Smooth and Inextensible Surfaces. In: Kimmel, R., Klette, R., Sugimoto, A. (eds) Computer Vision – ACCV 2010. ACCV 2010. Lecture Notes in Computer Science, vol 6494. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-19318-7_5
Download citation
DOI: https://doi.org/10.1007/978-3-642-19318-7_5
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-19317-0
Online ISBN: 978-3-642-19318-7
eBook Packages: Computer ScienceComputer Science (R0)