
Abstract
This paper presents a reactive multi-agent system for echelon platoon organization. Platoon systems are sets of vehicles that move together while keeping a predefined geometrical configuration without any material coupling. Each vehicle represents an autonomous agent that behaves based only on its own perceptions. The distributed platoon organization problem consists in defining the algorithms to be executed by each vehicle’s embedded software, in order to maintain the desired platoon configuration during displacements. Platoon systems found in literature deal generally with column formations adapted to urban or highway transportation systems. Other formations such as line, echelon,... can be encountered in fields like agriculture and the military. In this paper, we focus on the platoon echelon formation.
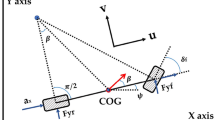
An approach based on a virtual vehicle-to-vehicle interaction model composed of two springs is proposed. Those virtual springs attach a platoon’s vehicle to its local leader, another platoon’s vehicle. In this work, five different spring’s attachment points are evaluated, to compare them and conclude about the more suitable one, depending on platoon’s trajectory. Eventually, from the evaluation results, it can be conceived to make attachment points evolve during platoon operation.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
Avanzini, P., Thuilot, B., Martinet, P.: A control strategy taking advantage of inter-vehicle communication for platooning navigation in urban environment. In: IROS 2011 International Workshop on Perception and Navigation for Autonomous Vehicles in Human Environment (2011)
Beard, R.W., Lawton, J., Hadaegh, F.Y.: A feedback architecture for formation control. In: American Control Conference, vol. 6, pp. 4087–4091 (2000)
Das, A.K., Fierro, R., Kumar, V., Ostrowski, J.P., Spletzer, J., Taylor, C.J.: A vision-based formation control framework. IEEE Transactions on Robotics and Automation 18(5), 813–825 (2002)
Daviet, P., Parent, M.: Longitudinal and lateral servoing of vehicles in a platoon. In: Proceedings of the IEEE Intelligent Vehicles Symposium, pp. 41–46 (1996) Automatic driving;Platooning techniques
Do, K.D., Pan, J.: Nonlinear formation control of unicycle-type mobile robots. Robotics and Autonomous Systems 55(3), 191–204 (2007)
El-Zaher, M., Contet, J.M., Gruer, P., Gechter, F.: Towards a compositional verification approach for multi-agent systems: Application to platoon system. In: First International workshop on Verification and Validation of Multi-agent Models for Complex Systems, V2CS (2011)
El-Zaher, M., Gechter, F., Gruer, P., Hajjar, M.: A new linear platoon model based on reactive multi-agent systems. In: The 23rd IEEE International Conference on Tools with Artificial Intelligence, ICTAI. IEEE Computer Society (2011)
Hedrick, J.K., Tomizuka, M., Varaiya, P.: Control issues in automated highway systems. IEEE Control Systems 14(6), 21–32 (1994)
Jean-Michel, C., Franck, G., Pablo, G., Abder, K.: Physics inspired multiagent system for vehicle platooning. In: Proceedings of the 6th International Joint Conference on Autonomous Agents and Multiagent Systems, AAMAS 2007, pp. 184:1–184:3. ACM (2007)
Moskwa, J.J., Karl Hedrick, J.: Nonlinear algorithms for automotive engine control. IEEE Control Systems Magazine 10(3), 88–93 (1990)
Scharf, D.P., Hadaegh, F.Y., Ploen, S.R.: A survey of spacecraft formation flying guidance and control. Part ii: control. In: American Control Conference, July 30-July 2, vol. 4, pp. 2976–2985 (2004)
Tanner, H.G., Pappas, G.J., Kumar, V.: Leader-to-formation stability. IEEE Transactions on Robotics and Automation 20(3), 443–455 (2004)
Woo, M.J., Choi, J.W.: A relative navigation system for vehicle platooning. In: Proceedings of the 40th SICE Annual Conference, SICE 2001 International Session Papers (IEEE Cat. No.01TH8603), pp. 28–31 (2001)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2012 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
El Zaher, M., Contet, JM., Gechter, F., Koukam, A. (2012). Echelon Platoon Organisation: A Distributed Approach Based on 2-Spring Virtual Links. In: Ramsay, A., Agre, G. (eds) Artificial Intelligence: Methodology, Systems, and Applications. AIMSA 2012. Lecture Notes in Computer Science(), vol 7557. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-33185-5_28
Download citation
DOI: https://doi.org/10.1007/978-3-642-33185-5_28
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-33184-8
Online ISBN: 978-3-642-33185-5
eBook Packages: Computer ScienceComputer Science (R0)