
Abstract
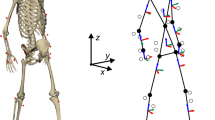
In this paper, we discuss the computation of human motion dynamics and its analysis of experts’ motion skills. The computation framework of the wire-driven multi-body dynamics previously developed by the authors is applied to the whole body human musculoskeletal model. While capturing time-series of motion data, somatosensory information measured by force plate and EMG sensors simultaneously is used for the dynamics computation. For the dynamics computation, we reduced the computation cost drastically by resolving to the non-linear optimization problem using decomposed gradient computation developed recently. As examples of analysis, we measured and analyzed experts’ motion patterns, such as Tai Chi motion, tap dance and drum playing. In particular, we analyzed the characteristic behavior by the motion of the center of gravity (COG), condition of the ground contact, and muscle activity of the whole body.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


References
Nakamura, Y., Yamane, K.: Dynamics computation of structure-varying kinematic chains and its application on human figures. IEEE Transaction on Robotics and Automation (2000)
Delp, S., Loan, J.: A computational framework for simulating and analyzing human and animal movement. IEEE Computing in Science and Engineering 2(5), 46–55 (2000)
Rasmussen, J., Damsgaard, M., Voigt, M.: Muscle recruitment by the min/max criterion - a comparative numerical study. Journal of Biomechanics 34(3), 409–415 (2001)
Forster, E., Simon, U., Augat, P., Claes, L.: Extension of a state-of-art optimization criterion to predict co-contraction. Journal of Biomechanics 37(4), 577–581 (2004)
Nakamura, Y., Yamane, K., Suzuki, I., Fujita, Y.: Somatosensory computation for man-machine interface from motion capture data and musculoskeletal human model. IEEE Transactions on Robotics (2005)
Nakamura, Y., Ikegami, Y., Yoshimatsu, A., Ayusawa, K., Imagawa, H., Oota, S.: Musculoskeletal morphing from human to mouse. In: IUTAM Symposium on Human Body Dynamics: From Multibody Systems to Biomechanics (2011)
Murai, A., Kurosaki, K., Yamane, K., Nakamura, Y.: Musculoskeletal-see-through mirror: Computational modeling and algorithm for whole-body muscle activity visualization in real time. Biophysics and Molecular Biology 3(103), 310–317 (2010)
Chadwick, E.K., Blana, D., van den Bogert, A.J., Kirsch, R.F.: A real-time, 3d musculoskeletal model for dynamic simulation of arm movements. IEEE Transactions on Biomedical Engineering 56(4), 941–948 (2009)
Ayusawa, K., Nakamura, Y.: Fast inverse kinematics algorithm for large dof system with decomposed computation of gradient and its application to musculoskeletal model. In: 17th Robotics Symposia (2B4) (2011) (in Japanese)
Ayusawa, K., Nakamura, Y.: Fast inverse dynamics algorithm with decomposed computation of gradient for wire-driven multi-body systems and its application to estimation of human muscle tensions. In: 2nd IFToMM International Symposium on Robotics and Mechatronics (11) (2011)
Ayusawa, K., Ikegami, Y., Nakamura, Y.: Simultaneous geometric parameters identification and inverse kinematics of time series motion by fast optimization using decomposed gradient computation. In: JSME Robotics and Mechatronics Conference 2012 (2P1-O10) (2012) (in Japanese)
Hill, A.: The heat of shortening and the dynamic constants of muscle. Proceedings of the Royal Society of London 126, 136–195 (1938)
Stroeve, S.: Impedance characteristic of a neuromusculoskeletal model of the human arm I. Posture control. Biological Cybernetics 81(5-6), 475–494 (1999)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2012 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Ikegami, Y., Ayusawa, K., Nakamura, Y. (2012). Masters’ Skill Explained by Visualization of Whole-Body Muscle Activity. In: Noda, I., Ando, N., Brugali, D., Kuffner, J.J. (eds) Simulation, Modeling, and Programming for Autonomous Robots. SIMPAR 2012. Lecture Notes in Computer Science(), vol 7628. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-34327-8_21
Download citation
DOI: https://doi.org/10.1007/978-3-642-34327-8_21
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-34326-1
Online ISBN: 978-3-642-34327-8
eBook Packages: Computer ScienceComputer Science (R0)