
Abstract
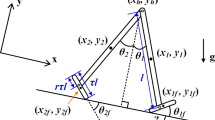
Though people’s usual gaits tend to be natural and simple, the theoretical modeling and analysis are complicated based on the remarkable fact that the walking motion is a complex dynamic phenomenon. In this paper, we build a passive dynamic bipedal walking model with flat feet and compliant ankle joints. The bipedal walker travels on a slope actuated by the gravity. We analyze effects of ankle-foot parameters on walking characteristics based on dynamic walking modeling. Simulation results demonstrate that the model can perform stable walking cycle. The effects of ankle-foot parameters on motion characteristics with different ankle stiffness are shown in detail.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


References
Kwan, M., Hubbard, M.: Optimal foot shape for a passive dynamic biped. J. Theor. Biol. 248, 331–339 (2007)
Wang, Q., Huang, Y., Wang, L.: Passive dynamic walking with flat feet and ankle compliance. Robotica 28(3), 413–425 (2010)
Tlalolini, D., Chevallereau, C., Aoustin, Y.: Comparison of different gaits with rotation of the feet for a planar biped. Robot. Auton. Syst. 57, 371–383 (2008)
Ker, R.F., Alexander, R.M., Bennett, M.B.: Why are mammalian tendons so thick? J. Zool. London 216, 309–324 (1988)
Hoboelen, D.G.E., Wisse, M.: Ankle actuation for limit cycle walkers. Int. J. Robot. Res. 27(6), 709–735 (2008)
Owaki, D., Osuka, K., Ishiguro, A.: Gait transition between passive dynamic walking and running by changing the body elasticity. In: Proc. of the SICE Annual Conference, pp. 2513–2518 (2008)
Huang, Y., Wang, Q., Chen, B., Xie, G., Wang, L.: Modeling and gait selection of passivity-based seven-link bipeds with dynamic series of walking phases. Robotica 30, 39–51 (2012)
Vukobratovic, M., Frank, A., Juricic, D.: On the stability of biped locomotion. IEEE Trans. Biomedical Eng. 17(1), 25–36 (1970)
McGeer, T.: Passive dynamic walking. Int. J. Robot. Res. 9, 68–82 (1990)
Collins, S., Ruina, A., Tedrake, R., Wisse, M.: Efficient bipedal robots based on passive-dynamic walkers. Science 307, 1082–1085 (2005)
Wisse, M., Feliksdal, G., van Frankenhuyzen, J., Moyer, B.: Passive based walking robot - Denise, a simple, efficient, and lightweight biped. IEEE Robot. Autom. Mag. 14(2), 52–62 (2007)
Wang, Q., Huang, Y., Zhu, J., Wang, L., Lv, D.: Effects of foot shape on energetic efficiency and dynamic stability of passive dynamic biped with upper body. Int. J. Hum. Robot. 7(2), 295–313 (2010)
Ishikawa, M., Komi, P.V., Grey, M.J., Lepola, V., Bruggemann, G.: Muscle-tendon interaction and elastic energy usage in human walking. J. Appl. Physiology 99, 603–608 (2005)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2012 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Mai, J., Gao, Y., Huang, Y., Wang, Q., Zhang, L. (2012). Analyzing Effects of Ankle-Foot Parameters on Passive Bipeds Based on Dynamic Walking Modeling. In: Xiao, T., Zhang, L., Fei, M. (eds) AsiaSim 2012. AsiaSim 2012. Communications in Computer and Information Science, vol 323. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-34384-1_17
Download citation
DOI: https://doi.org/10.1007/978-3-642-34384-1_17
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-34383-4
Online ISBN: 978-3-642-34384-1
eBook Packages: Computer ScienceComputer Science (R0)