
Abstract
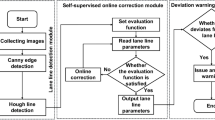
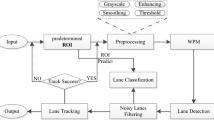
In this paper, a real-time lane detection algorithm based on vision is presented. This algorithm improves the robustness and real-time of processing by combining with the dynamic region of interest (ROI) and the prior knowledge. When the lanes detected from previous frames have little changes for several frames, we recognize the lane only in dynamic ROI. We also proposed an erosion operator to refine the edge and a Hough transform with a restrict search space to detect lines with a faster rate. Experiments in structured road showed that the proposed lane detection method can work robustly in real-time, and can achieve a speed of 30ms/frame for 720×480 image size.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others
References
Wang, Y., Teoha, E.K., Shen, D.: Lane detection and tracking using B-Snake. Image and Vision Computing 22(4), 269–280 (2004)
Wang, Y., Dahnoun, N., Achim, A.: A novel system for robust lane detection and tracking. Signal Processing 92(2), 319–334 (2012)
Bertozzi, M., Broggi, A.: GOLD: Aparallel real-timestereo vision system for generic obstacle and lane detection. IEEE Transactions on Image Processing 7(1), 62–81 (1998)
Kreucher, C., Lakshmanan, S.: Lane: A lane extraction algorithm that uses frequency domain features. IEEE Transactions on Robotics and Automation 15(2), 343–350 (1999)
Redmill, K.A., Upadhya, S., Krishnamurthy, A., Özgüner, Ü.: A lane tracking system for intelligent vehicle applications. In: IEEE Intelligent Transportation Systems, Oakland, pp. 273–279 (2001)
Lee, J.W., Yi, U.K.: A lane-departure identification based on LBPE, Hough transform, and linear regression. Computer Vision and Image Understanding 99(3), 359–383 (2005)
Yim, Y.U., Oh, S.-Y.: Three-feature based automatic lane detection algorithm (TFALDA) for autonomous driving. IEEE Transactions on Intelligent Transportation Systems 4(4), 219–225 (2003)
Wang, Y., Shen, D., Teoh, E.X.: Lane Detection Using Catmull-Rom Spline. In: IEEE International Conference on Intelligent Vehicles, pp. 51–57 (1998)
Bi, Y., Guan, X., Zhan, J.: A method of mark line searching in detection process. Automotive Engineering 28(5), 439–442 (2006)
Yu, H.-Y., Zhang, W.-G.: Lane tracking and departure detection based on linear mode. Processing Automation Instrumentation 30(11), 1–3 (2009) (in Chinese)
Yu, T.-H.: Study on Vision based Lane Departure Warning System. Univ. of Jilin, Jilin (2006) (in Chinese)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Ran, F., Jiang, Z., Wang, T., Xu, M. (2013). A Study of Vision-Based Lane Recognition Algorithm for Driver Assistance. In: Tan, Y., Shi, Y., Mo, H. (eds) Advances in Swarm Intelligence. ICSI 2013. Lecture Notes in Computer Science, vol 7929. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-38715-9_53
Download citation
DOI: https://doi.org/10.1007/978-3-642-38715-9_53
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-38714-2
Online ISBN: 978-3-642-38715-9
eBook Packages: Computer ScienceComputer Science (R0)